Dom
>
Produkty > żyroskop laserowy > Pierścieniowy żyroskop laserowy > Pierścieniowy żyroskop laserowy Inercyjny system nawigacji indeksowanej w dwóch osiach
Produkty
Nowe Produkty
 Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV- Wszystkie nowe produkty

Pierścieniowy żyroskop laserowy Inercyjny system nawigacji indeksowanej w dwóch osiach
Pierścieniowy żyroskop laserowy Inercyjny system nawigacji z indeksowaniem dwuosiowym-D90C to bezwładnościowy system nawigacji oparty na pierścieniowym żyroskopie laserowym i elastycznym akcelerometrze kwarcowym. Może być łączony z wysokościomierzem, GNSS, prędkościomierzem i innym sprzętem pomocniczym, może dostarczać przewoźnikowi lotniczemu, przewoźnikowi naziemnemu i innym informacjom nawigacyjnym, takim jak prędkość, pozycja i położenie.
Model:JIO-D90C
Wyślij zapytanie Pobierz plik PDF
Opis produktu
Pierścieniowy żyroskop laserowy Indeksujący dwuosiowy system nawigacji bezwładnościowej-D90C Wprowadzenie
JIO-D90C to bezwładnościowy system nawigacji oparty na pierścieniowym żyroskopie laserowym i elastycznym akcelerometrze kwarcowym. Może być łączony z wysokościomierzem, GNSS, prędkościomierzem i innym sprzętem pomocniczym, może dostarczać przewoźnikowi lotniczemu, przewoźnikowi naziemnemu i innym informacjom nawigacyjnym, takim jak prędkość, pozycja i położenie. Systemy nawigacji bezwładnościowej serii D90C mogą być szeroko stosowane w czołgach wszelkiego rodzaju pojazdów opancerzonych, artylerii samobieżnej, rakiet, wszelkiego rodzaju bezzałogowych statków powietrznych, samolotów, statków, samochodów, kolei dużych prędkości, pojazdów bezzałogowych, mobilnych systemów łączności satelitarnej, platform wiertniczych i innych platform transportowych. Sterowanie lotem, stabilizacja postawy, platforma stabilizacji broni, pozycjonowanie i pozycjonowanie itp.
Właściwości techniczne
Dwuosiowy mechanizm indeksowania w celu ograniczenia błędów
Pierścieniowy żyroskop laserowy o wysokiej dokładności i akcelerometr kwarcowy
Opcjonalna statyczna lub ruchoma samonastawność podstawy
Kalibracja i kompensacja parametrów błędów w pełnym zakresie temperatur
Opcjonalne różnorodne interfejsy wejściowe dla GNSS/hodometru/DVL
Konfigurowalne tryby nawigacji
Doskonała przydatność dla środowiska
Normy wojskowe
Pierścieniowy żyroskop laserowy o wysokiej dokładności i akcelerometr kwarcowy
Opcjonalna statyczna lub ruchoma samonastawność podstawy
Kalibracja i kompensacja parametrów błędów w pełnym zakresie temperatur
Opcjonalne różnorodne interfejsy wejściowe dla GNSS/hodometru/DVL
Konfigurowalne tryby nawigacji
Doskonała przydatność dla środowiska
Normy wojskowe
Typowe scenariusze aplikacji
Nawigacja pojazdów podwodnych
Pozycjonowanie i wyszukiwanie północy dla pojazdów lądowych
Stabilizacja i kontrola poruszającego się nośnika
Pomiar położenia dla wymagających aplikacji
Pozycjonowanie i wyszukiwanie północy dla pojazdów lądowych
Stabilizacja i kontrola poruszającego się nośnika
Pomiar położenia dla wymagających aplikacji
Główne funkcje systemu
Ma funkcję wysyłania informacji, takich jak pozycja przewoźnika, kurs, kąt nachylenia, prędkość kątowa i prędkość w czasie rzeczywistym;
Posiada tryby pracy, takie jak czysta nawigacja bezwładnościowa i zintegrowana nawigacja INS/GNSS (w tym Beidou);
Posiadają funkcję odbierania informacji nawigacji satelitarnej dostarczanych przez urządzenia wzorcowe częstotliwości zewnętrznego systemu czasu;
Ma funkcję samoczynnego wyrównania gruntu i obsługuje funkcję wyrównania powietrza;
Posiada takie funkcje, jak autotest po włączeniu zasilania, okresowy autotest, raport stanu, kompensacja błędów instalacji i pamięć nieulotna.
Posiada tryby pracy, takie jak czysta nawigacja bezwładnościowa i zintegrowana nawigacja INS/GNSS (w tym Beidou);
Posiadają funkcję odbierania informacji nawigacji satelitarnej dostarczanych przez urządzenia wzorcowe częstotliwości zewnętrznego systemu czasu;
Ma funkcję samoczynnego wyrównania gruntu i obsługuje funkcję wyrównania powietrza;
Posiada takie funkcje, jak autotest po włączeniu zasilania, okresowy autotest, raport stanu, kompensacja błędów instalacji i pamięć nieulotna.
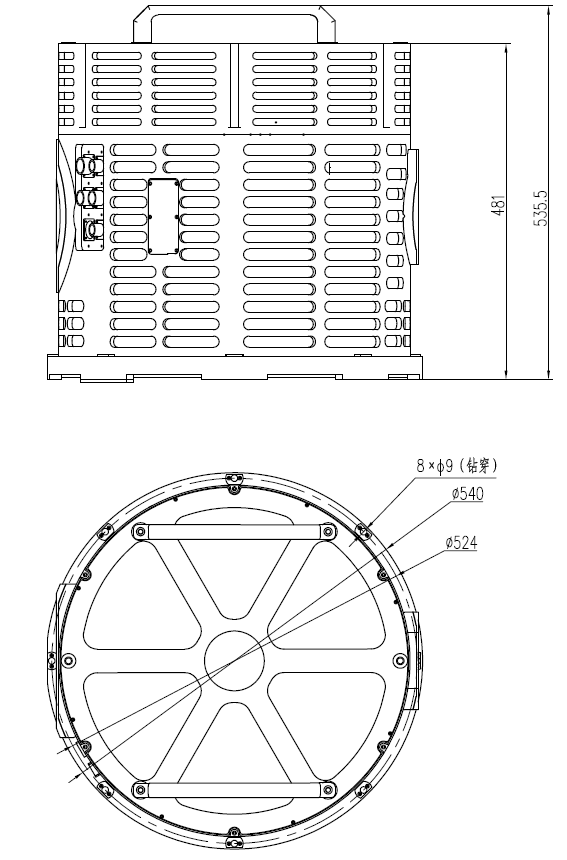
Skład i wymiary systemu
Cały system składa się z dwóch części: głównego instrumentu nawigacji inercyjnej i wspornika głównego instrumentu nawigacji inercyjnej. Wśród nich zewnętrzne wymiary głównego instrumentu są następujące:
Główne wskaźniki techniczne systemu
| Dokładność systemu Dokładność systemu |
Czysta nawigacja inercyjna / Czysta nawigacja inercyjna |
2,0 mil/5 d, SZCZYT |
|
| Zintegrowana nawigacja/nawigacja z GNSS |
¤5m , 1Ï _ |
||
| Kąt kursu /Kierunek |
0,01°, RMS |
||
| Postawa pozioma (przechylenie i pochylenie) Postawa pozioma (rolka |
0,005°, RMS |
||
| Czysta prędkość bezwładności |
1m/s, RMS |
||
| GNSS Zintegrowana nawigacja Prędkość |
0,1 m/s, RMS |
||
| Wskaźniki urządzeń inercyjnych Parametry żyroskopu i akcelerometru |
żyroskop laserowy _ Żyroskop |
Zasięg/Zasięg |
± 6 00 st./s |
| Stabilność odchylenia |
≤0,02 st./h, 1Ï |
||
| Zerowa powtarzalność odchylenia Powtarzalność odchylenia |
≤0,02 st./h, 1Ï |
||
| Nieliniowość współczynnika skali |
1 ppm |
||
| Akcelerometr Akcelerometr |
Zasięg/Zasięg |
± 15g _ |
|
| Stabilność odchylenia |
¤10µg, 1Ï |
||
| Zerowa powtarzalność odchylenia Powtarzalność odchylenia |
¤10µg, 1Ï |
||
| Nieliniowość współczynnika skali |
15 str./min |
||
| czas wyrównania Czas wyrównania |
Chłodny początek |
¤ 10 min |
|
| Uruchom ponownie |
¤15 min |
||
| Start w powietrzu/w locie |
ponad 10 godz |
||
| Interfejs Funkcje interfejsu |
Napięcie zasilania/napięcie |
18~36VDC |
|
| Pobór energii |
➢ 40 W przy 24 V prądu stałego |
||
| Interfejs elektryczny/elektryczny |
RS232 × 2 RS422 × 3 CAN × 2 Ethernet × 1 1 pps × 1 |
||
| Szybkość aktualizacji danych (konfigurowalna) |
200 Hz przy 115,2 kb/s _ _ _ |
||
| Użyj środowiska Środowisko |
temperatura robocza |
-40°C ~ 65°C |
|
| Temperatura przechowywania/Temperatura przechowywania |
-55°C ~ 85°C |
||
| Użyj wysokości/wysokości |
20000m |
||
| Wilgotność |
95% (25°C) |
||
| Wibracje/wibracje |
5 g przy 20 ~ 2000 Hz |
||
| Szok / Szok |
40 g, 11 ms, 1/2 sinusa |
||
| Właściwości fizyczne Fizyczne |
Wymiary/rozmiar (dł.*szer.*wys.) |
540x536mm_ |
|
| Waga / Waga |
55 kg |
||
Uwaga: Konstrukcję można dostosować do wymagań użytkownika.
Gorące Tagi: Pierścieniowy żyroskop laserowy Dwuosiowy indeksujący system nawigacji bezwładnościowej, producenci, dostawcy, fabryka, Chiny, Made in China, dostosowany, wysoka jakość
Powiązana kategoria
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.
Produkty powiązane