Dom
>
Produkty > Moduł dalmierza laserowego > Moduł dalmierza laserowego 1535nm > 10-kilometrowym module laserowego ranfinder (LRF)
Produkty
Nowe Produkty
 Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV- Wszystkie nowe produkty
")


10-kilometrowym module laserowego ranfinder (LRF)
STA-B1015X to ludzki moduł pomiaru odległości lasera, który może wykryć odległość docelową i przesyłać zmierzoną odległość do górnego komputera poprzez komunikację szeregową. Widoczność ≥ 15 km, współczynnik odbicia docelowego ≥ 0,3, wilgotność ≤ 80%, pojazd 2,3 m × 2,3 m (cel NATO) odległość ≥10 km; cele budynków maksymalnie ≥15 km.
Wyślij zapytanie
Opis produktu
Główne funkcje
(1) pojedynczy odległość i ciągłe;
(2) reagowanie na polecenia laserowe i może przestać w dowolnym momencie zgodnie z poleceniem Stop;
(3) dane dotyczące odległości i informacji o stanie raz na impuls podczas pomiaru odległości;
(4) może zgłaszać skumulowaną liczbę przesyłanych impulsów laserowych (brak utraty mocy w dół);
(5) wybór odległości, przednie i tylne wskazanie docelowe;
(6) Funkcja autotestu.
(2) reagowanie na polecenia laserowe i może przestać w dowolnym momencie zgodnie z poleceniem Stop;
(3) dane dotyczące odległości i informacji o stanie raz na impuls podczas pomiaru odległości;
(4) może zgłaszać skumulowaną liczbę przesyłanych impulsów laserowych (brak utraty mocy w dół);
(5) wybór odległości, przednie i tylne wskazanie docelowe;
(6) Funkcja autotestu.
Wprowadzenie produktu
Moduł laserowy B1015X Rangefinder to wojskowy laserowy w zakresie pulsowy zaprojektowany do scenariuszy aplikacji, takich jak samoloty, bezzałogowe pojazdy powietrzne, zbiorniki i zakres. Ma małe, lekkie, niskie zużycie energii, stabilną wydajność, długą odległość pomiaru i długą żywotność, bezpieczeństwo wzroku człowieka i inne zalety, jest ważnym sprzętem technicznym w celu poprawy dokładności celowania produktu.
Wskaźnik wydajności produktu dla modułu LRF B1015X
| Przedmiot | Parametr techniczny | Instrukcja |
| Model | STA-B1015X | |
| Działająca długość fali | 1535 ± 5 nm | |
| Bezpieczeństwo wzroku | Klasa 1 (IEC 60825-1) | |
| Odbieranie przysłony | Φ40 mm | |
| Przysłona emisji | Φ14 mm | |
| Zdolność w zakresie | 50m-15 km | |
| Zakres | ≥18000 m | Maksymalny zakres, współczynnik odbicia: 0,9, widoczność obserwatora 25 km |
| ≥15000 m | Budowanie celów, współczynnik odbicia: 0,6, widoczność obserwatora 25 km | |
| ≥10000 m | Cel NATO | |
| ≥6000 m | Ludzki cel | |
| ≥ 2500 m | Cel UAV | |
| Mini zakres | 50m |
|
| Wykrywanie wielu celów | Do 3 celu |
|
| Dokładność w zakresie | ± 1m | 3d |
| Częstotliwość w zakresie | 1 ~ 10 Hz regulowany |
|
| Wskaźnik dokładności | ≥98% |
|
| Fałszywa szybkość alarmu | 1% |
|
| Kąt rozbieżności | ≤0,3mrad |
|
| Interfejs komunikacyjny | Rs422 | Interfejs TTL/RS232 można dostosować |
| Woltaż | 9 ~ 32 V. | Napięcie wejściowe można dostosować zgodnie z wymaganiami |
| Siła robocza | ≤3 W (@10 Hz) | Normalny test temperatury |
| Moc szczytowa | ≤6 W. | Normalny test temperatury |
| Szok mechaniczny | 75G, 1 ms |
|
| Temperatura pracy | -40 ℃~+60 ℃ |
|
| Temperatura przechowywania | -45 ℃~+70 ℃ |
|
| Niezawodność | MTBF ≥ 1500H |
|
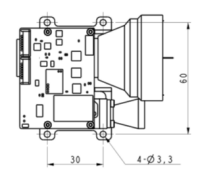
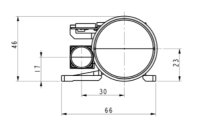
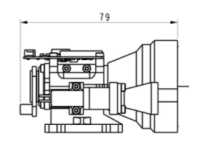
| Rozmiar | ≤79 × 66 × 46 mm |
|
| Waga | ≤120 g |
|
| Główna funkcja | Pierwszy i ostatni cel, wielopasmowy, selektywność odległości odległości | |
Uwagi:
1) rozmiar docelowy NATO 2,3 m × 2,3 m; Rozmiar docelowy człowieka 0,5 m × 1,7 m; Rozmiar docelowy UAV 0,2 m × 0,3 m; Współczynnik odbicia 30%, widoczność obserwatora ≥ 15 km
Interfejs instalacyjny struktury
Interfejs zewnętrzny
| Szpilka | Definicja | Funkcjonować | Notatki |
| 1 | Rx+ | Odbiornik RS422 + | Niebieski |
| 2 | Rx- | Odbiornik RS422 - | Zielony |
| 3 | Tx- | Transmisja RS422 - | Fioletowy |
| 4 | TX+ | RS422 Transmission + | Żółty |
| 5 | GND | Drut uziemienia komunikacji | Biały |
| 6 | Vee | Zasilacz + | Czerwony |
| 7 | GND | Zasilacz - | Czarny |
| 8 | PWN i | / | Popiół |
Zdolność adaptacji środowiskowej
a) Temperatura robocza : -40 ℃~+60 ℃.
b) Temperatura przechowywania : -45 ℃~+70 ℃.
C) Losowe wibracje: 15 ~ 2000 Hz, 3 kierunki. Konkretne warunki testowe pokazano w tabeli 1.
b) Temperatura przechowywania : -45 ℃~+70 ℃.
C) Losowe wibracje: 15 ~ 2000 Hz, 3 kierunki. Konkretne warunki testowe pokazano w tabeli 1.
Tabela 1 Warunki testu losowego wibracji
| Numer seryjny | Zakres częstotliwości (HZ) | Gęstość widmowa przyspieszenia (G2/Hz) | Czas wibracji (min) |
| 1 | 15 ~ 190 | 0.01 | Wibracje w każdym kierunku 15 minut |
| 2 | 190 ~ 210 | 0.1 | |
| 3 | 210 ~ 380 | 0.01 | |
| 4 | 380 ~ 420 | 0.025 | |
| 5 | 420 ~ 2000 | 0.01 |
Moduły i niestandardowe rozwiązania OEM/ODM
B1015X jest przeznaczony dla integratorów systemów szukających wygodnego, mocnego i kompaktowego rozwiązania laserowego. Zapewnia niezawodną wydajność w szerokim zakresie aplikacji.
Jest bardzo mały, ultra-światło, ma niskie zużycie energii i może być mierzone na dłużej. Jest odpowiedni do urządzeń ręcznych (obrazowanie termiczne), zastosowania montażowe broni, systemy przenośne i lekkie apartamenty czujników oraz bezzałogowe pojazdy powietrzne lub UGV.
Jest bardzo mały, ultra-światło, ma niskie zużycie energii i może być mierzone na dłużej. Jest odpowiedni do urządzeń ręcznych (obrazowanie termiczne), zastosowania montażowe broni, systemy przenośne i lekkie apartamenty czujników oraz bezzałogowe pojazdy powietrzne lub UGV.
Komunikowanie protokołu
1. Protokół transmisji: asynchroniczna komunikacja szeregowa;
2. Stawka portu: 115200;
3. Bity danych: 10 bitów: jeden bit startowy, 8 bitów danych, jeden bit stopu, nieprawidłowa weryfikacja;
4. Struktura danych: Dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametru i bajtu sprawdzania;
5. Tryb komunikacji: Kontrola główna wysyła polecenia sterujące do komputera dystansowego, a komputer odbywa się i wykonuje instrukcje. W stanie dystansowym maszyna do rozbieżności wysyła dane i status maszyny rozmiarowej z powrotem do górnego komputera zgodnie z cyklem dystansowym. Format komunikacji i zawartość poleceń pokazano w poniższej tabeli.
A) Sterowanie główne wysyła
Format przesłania wiadomości jest następujący:
2. Stawka portu: 115200;
3. Bity danych: 10 bitów: jeden bit startowy, 8 bitów danych, jeden bit stopu, nieprawidłowa weryfikacja;
4. Struktura danych: Dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametru i bajtu sprawdzania;
5. Tryb komunikacji: Kontrola główna wysyła polecenia sterujące do komputera dystansowego, a komputer odbywa się i wykonuje instrukcje. W stanie dystansowym maszyna do rozbieżności wysyła dane i status maszyny rozmiarowej z powrotem do górnego komputera zgodnie z cyklem dystansowym. Format komunikacji i zawartość poleceń pokazano w poniższej tabeli.
A) Sterowanie główne wysyła
Format przesłania wiadomości jest następujący:
| STX0 | CMD | Len | Data1h | Data1l | Chk |
Tabela 2 Opis formatu wysłanej wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Wiadomość Flaga Start | A5 (H) |
|
| 2 | CMD | CW | Patrz Tabela 3 |
|
| 3 | Len | Dl | Liczba wszystkich bajtów oprócz znaku początkowego, słowa polecenia i sumy kontrolnej |
|
| 4 | Datah | parametr | Patrz Tabela 3 |
|
| 5 | przyjazd |
|
||
| 6 | Chk | Weryfikacja XOR | Z wyjątkiem ważnego bajtu, wszystkie pozostałe bajty są XORED |
|
Polecenie jest opisane w następujący sposób:
Tabela 3 Opis poleceń i słów danych wysyłanych przez Master na maszynę do odległości
Tabela 3 Opis poleceń i słów danych wysyłanych przez Master na maszynę do odległości
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | długość | Przykładowy kod |
| 1 | 0x00 | przerwać | Datah = 00 (H) datalu = 00 (H) | RangeFinder przestaje mierzyć | Sześć bajtów | A5 00 02 00 A7 |
| 2 | 0x01 | Pojedynczy oddział | Datah = 00 (H) datalu = 00 (H) |
|
Sześć bajtów | A5 01 02 00 00 A6 |
| 3 | 0x02 | Ciągły odległość | Datah = xx (h) datal = yy (h) | Dane opisują okres rozdziału, w MS | Sześć bajtów | A5 02 02 03 E8 4E (1Hz Dystrybucja) |
| 4 | 0x03 | samoocena | Datah = 00 (H) datalu = 00 (H) |
|
Sześć bajtów | A5 02 02 00 A4 |
| 5 | 0x04 | Ustaw najbliższą odległość do wyboru | Datah = xx (h) datal = yy (h) | Dane opisują wartość strefy niewidomej, jednostka 1M | Sześć bajtów | A5 04 02 00 64 C7 (100m to najbliższa odległość) |
| 6 | 0x06 | Skumulowana liczba zapytań o wyjściowe światła | Datah = 00 (H) datalu = 00 (H) | Skumulowana liczba zapytań o wyjściowe światła | Sześć bajtów | A5 06 02 00 A1 |
| 7 | 0x11 | APD Power jest włączony | Datah = 00 (H) datalu = 00 (H) |
|
Sześć bajtów | A5 11 02 00 B6 |
| 8 | 0x12 | APD Power jest wyłączona | Datah = 00 (H) datalu = 00 (H) |
|
Sześć bajtów | A5 12 02 00 B5 |
| 9 | 0xeb | Zapytanie o liczbę | Datah = 00 (H) datalu = 00 (H) | Zapytanie o liczbę | Sześć bajtów | A5 EB 02 00 00 4C |
a) Kontrola główna odbiera format
Format otrzymanej wiadomości jest następujący:
Format otrzymanej wiadomości jest następujący:
| STX0 | CMD | Len | Dane | Data0 | Chk |
Tabela 4 Opis formatu otrzymanych wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Wiadomość Start Flag 1 | A5 (H) |
|
| 2 | Cmd_jg | Słowo polecenia danych | Patrz Tabela 5 |
|
| 3 | Len | Dl | Liczba wszystkich bajtów oprócz znaku początkowego, słowa polecenia i sumy kontrolnej |
|
| 4 | Dn | parametr | Patrz Tabela 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Weryfikacja XOR | Z wyjątkiem ważnego bajtu, wszystkie pozostałe bajty są XORED |
|
Opis statusu otrzymania kontroli głównej:
Tabela 5 opisuje słowo danych wysyłane przez RangeFinder do kontrolera głównego
Tabela 5 opisuje słowo danych wysyłane przez RangeFinder do kontrolera głównego
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | całkowita długość |
| 1 | 0x00 | przerwać | D1 = 00 (H) D0 = 00 (H) |
|
Sześć bajtów |
| 2 | 0x03 | samoocena | D8 ~ D1 | D8-D7: -5 V Napięcie, jednostka 0,01 V.D6-D5: Wartość ślepa plamka, jednostka 1MD4: APD Wartość wysokiego napięcia, jednostka V; D3: Typ charakteru, wskazujący temperaturę APD, jednostka: stopnie celsus; D2-D1: +5V Napięcie, jednostka 0,01 V. | 12 bajtów |
| 3 | 0x04 | Odległość do najbliższego ustawienia dostępu, jednostka M | D1 D0 | Dane opisują najbliższą wartość odległości, jednostka 1M; rozpocznij wysokie i kończą niskie | Sześć bajtów |
| 4 | 0x06 | Skumulowana liczba zapytań o wyjściowe światła | D3 ~ D0 | Dane wyrażają liczbę świateł, 4 bajty, z pierwszym wysokim bajtem | Siedem bajtów |
| 5 | 0x11 | APD Power jest włączony | D1 = 00 (H) D0 = 00 (H) | APD Power jest włączony | Sześć bajtów |
| 6 | 0x12 | APD zasilanie | D1 = 00 (H) D0 = 00 (H) | APD Power jest wyłączona | Sześć bajtów |
| 7 | 0xed | Praca nadgodzin | 0x00 0x00 | Laser jest pod ochroną pracy laserowej i nie można go zmierzyć. | Sześć bajtów |
| 8 | 0xee | Błędy skuteczności | 0x00 0x00 |
|
Sześć bajtów |
| 9 | 0xef | Limit czasu komunikacji portu szeregowego | 0x00 0x00 |
|
Sześć bajtów |
| 10 | 0x01 | Pomiar pojedynczego zakresu (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) odległość D5-D3 do drugiego celu (jednostka: 0,1 m) D2-D0 trzecia odległość docelowa (jednostka 0,1 m) 3. Cele pochodzą z bliskiego bajtu flagi Fard9 (BIT7-BIT0): D9 to 7. pozycja wskazująca fala główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to 6. pozycja wskazująca echo; 1: Istnieje echo, 0: Brak echod9 Piąta pozycja wskazuje status lasera; 1: Normalny laser, 0: Laser Faird9 jest czwartym flagą limitu czasu, 1: Normal, 0: Limit czasu czasowy jest nieprawidłowy w trzeciej pozycji (ustawiony na 1); D9 Druga pozycja wskazuje status APD; 1: Normal, 0: Errord9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje poprzedni cel, 0: Brak poprzedniego celu (cel w obszarze ślepym) .D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje późniejszy cel, 0: Brak kolejnego celu (celem po głównym celu jest późniejszy cel) | 14 bajtów |
| 11 | 0x02 | Ciągły odległość (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) odległość D5-D3 do drugiego celu (jednostka: 0,1 m) D2-D0 trzecia odległość docelowa (jednostka 0,1 m) 3. Cele pochodzą z bliskiego bajt flagi FARD9 (BIT7-BIT0): D9 to 7. bit wskazujący na falę główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to 6. pozycja wskazująca echo; 1: Istnieje echo, 0: Brak echod9 Piąta pozycja wskazuje status lasera; 1: Normalny laser, 0: Laser Faird9 jest czwartym flagą limitu czasu, 1: Normal, 0: Limit czasu czasowy jest nieprawidłowy w trzeciej pozycji (ustawiony na 1); D9 Druga pozycja wskazuje stan APD; 1: Normal, 0: Errord9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje poprzedni cel, 0: Brak poprzedniego celu (cel w obszarze ślepym) .D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje późniejszy cel, 0: Brak kolejnego celu (celem po głównym celu jest późniejszy cel) | 14 bajtów |
| 12 | 0xeb | Zapytanie o liczbę | D17 …… D0 | D17 D16 D15 D14 D13 D12 Model całego maszyny Coded11d10 Numer produktu | 22 bajtów |
| Uwaga: ① Niezdefiniowany bajt/bit, domyślnie to 0; | |||||
Gorące Tagi: 10-kilometrowym moduł laserowy (LRF), producenci, dostawcy, Chiny, producenci, producent
Powiązana kategoria
Moduł dalmierza laserowego 905nm
Moduł dalmierza laserowego 1535nm
Moduł dalmierza laserowego 1570nm
1,54UM LASER MODULE
1064 Nm Laser Cel Desperator
Moduł anty -dronów
Zasięgowy moduł Lidar
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.