Dom
>
Produkty > Moduł dalmierza laserowego > Moduł anty -dronów > Moduł dalmierza laserowego 2mrad o zasięgu 2 km do wspornika przeciw dronom
Produkty
Nowe Produkty
 Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV- Wszystkie nowe produkty



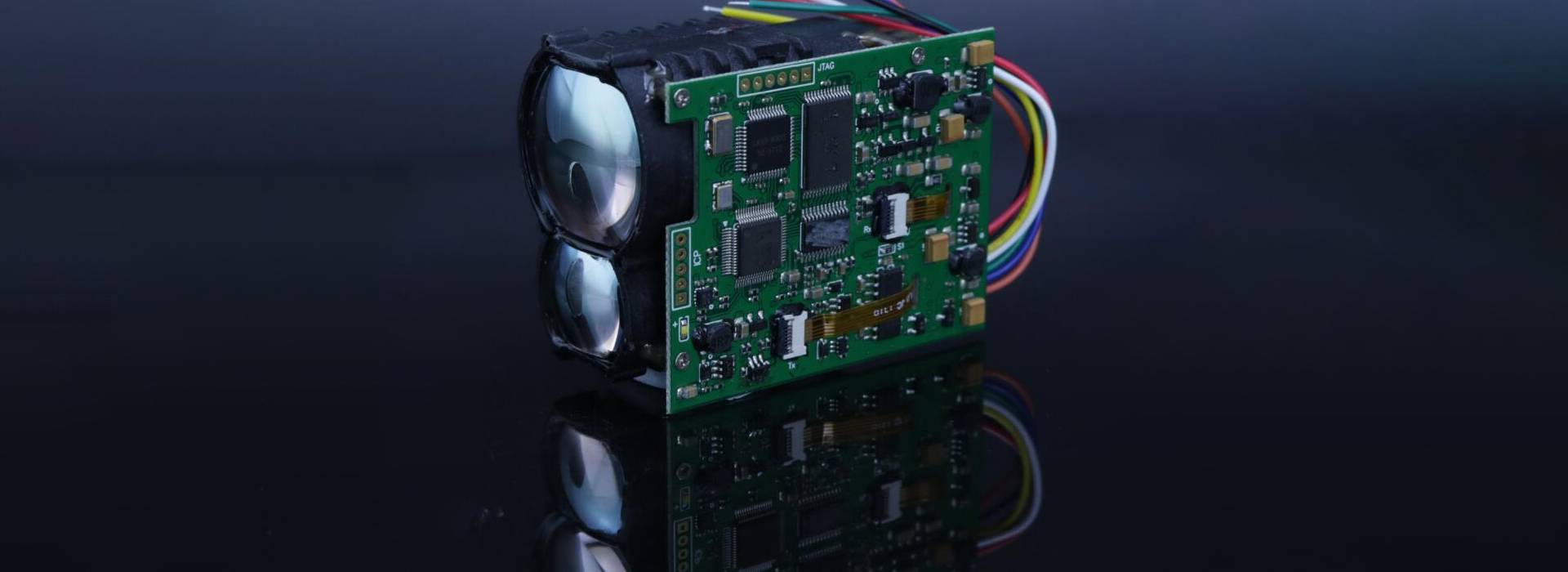
Moduł dalmierza laserowego 2mrad o zasięgu 2 km do wspornika przeciw dronom
Kompaktowy moduł dalmierza laserowego STA-WR2000X doskonale nadaje się do integracji z systemami obrony powietrznej armii i marynarki wojennej. Moduł pomiaru odległości wykorzystuje najbardziej zaawansowany laser ze szkła erbowego pompowany diodami, który charakteryzuje się wysoką dostępnością i niskimi kosztami konserwacji. Dzięki kątowi rozbieżności wynoszącemu 2 mrad może mierzyć UAV o przekroju od 0,1 ㎡ do 2000 metrów, co czyni go ważnym elementem systemów przeciw dronom.
Wyślij zapytanie
Opis produktu
1) Zakres pojedynczy i zakres ciągły;
2) Reagowanie na polecenia namierzania lasera i zatrzymywanie namierzania w dowolnym momencie zgodnie z poleceniem zatrzymania;
3) Wysyła dane dotyczące odległości i informacje o stanie raz na impuls podczas ustalania odległości;
4) Może raportować skumulowaną liczbę przesłanych impulsów laserowych (bez utraty mocy);
5) Wybór odległości, przed i po wskazaniu celu;
6) Funkcja autotestu.
2) Reagowanie na polecenia namierzania lasera i zatrzymywanie namierzania w dowolnym momencie zgodnie z poleceniem zatrzymania;
3) Wysyła dane dotyczące odległości i informacje o stanie raz na impuls podczas ustalania odległości;
4) Może raportować skumulowaną liczbę przesłanych impulsów laserowych (bez utraty mocy);
5) Wybór odległości, przed i po wskazaniu celu;
6) Funkcja autotestu.
| Indeks optyczny | |
| Długość fali | 1535nm±5nm |
| Kąt rozbieżności lasera | ≤2mrad |
| Efektywna apertura odbiorcza | 56mm |
| Częstotliwość zakresu | Pojedynczy, regulowany w zakresie 1~10 Hz |
| Zakres | Widoczność ≥ 12 km, współczynnik odbicia celu ≥ 0,3, wilgotność ≤ 80%, odległość zasięgu UAV (0,25 m × 0,25 m) ≥ 2 km |
| Dokładność zasięgu | ≤±1m (RMS) |
| Pomiar dokładności | ≥98% |
| Liczba fałszywych alarmów | ≤1% |
| Minimalny zakres pomiarowy | ≤50 m |
| Stabilność osi lasera | ≤0,05 mrad |
| Oś optyczna jest równoległa do punktu odniesienia instalacji | ≤0,3 mrada |
| Wskaźniki mechaniczne | |
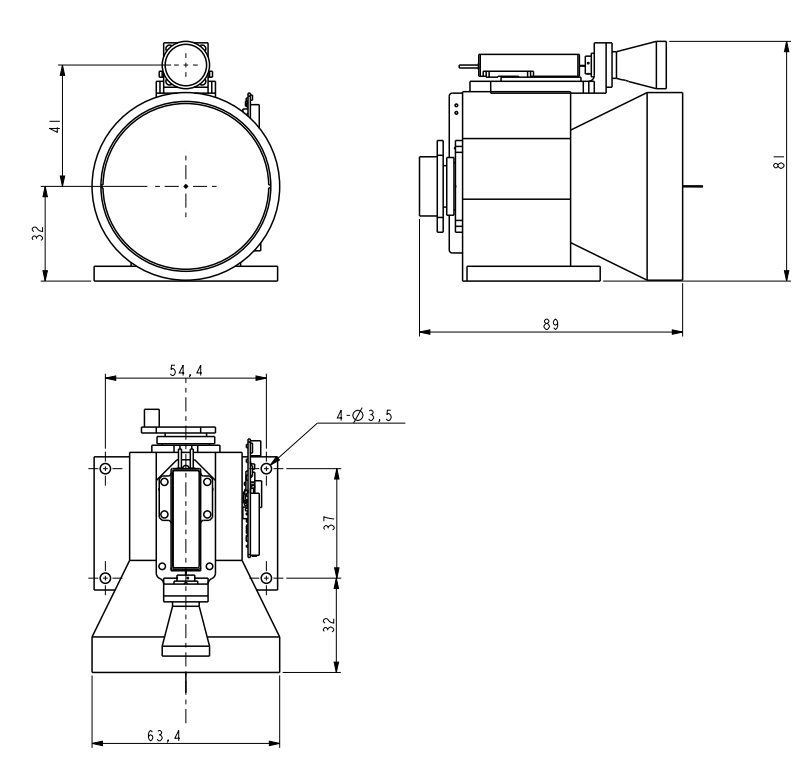
| Rozmiar | ≤90×63×82 mm |
| Waga | ≤300g |
| Wskaźniki elektryczne | |
| Dostarcz prąd | DC9V ~ 32V |
| Rozpraszanie mocy | Pracuj mniej niż 3 W przy 10 Hz, szczytowy pobór mocy mniejszy niż 5 W |
| Interfejs | Interfejs RS422, 115200bps |
| Interfejs sterowania włączaniem | Po osiągnięciu bezpiecznej odległości włącz zasilanie i użyj go; lub w trybie niskiego poboru mocy, aby kontrolować jego stan pracy |
| Ochrona płytki drukowanej | Po zakończeniu projektowania i debugowania płytki drukowanej należy pokryć farbą przeciwwstrząsową i wykonać zabieg „trzech zabezpieczeń” |
| Przydatność środowiskowa | |
| Temperatura pracy | -40 ℃ -65 ℃ |
| Temperatura przechowywania | -55 ℃ -70 ℃ |
| Wibrować | GJB150.16 A-2009 „Metody badań środowiskowych laboratorium sprzętu wojskowego – badanie wibracyjne” |
| Bicz | GJB150.18 A-2009 „Metoda badań środowiskowych laboratorium sprzętu wojskowego – badanie udarności” |
Notatka:
1. Opis zakresu zasięgu: zakres będzie się zmieniać w zależności od warunków testowych i celów testowych. Jeśli wykryjesz cele specjalne, skontaktuj się ze stroną sprzedaży w celu potwierdzenia;
2.Zasięg minimalny: wahania 30-100 m, po normalnym użytkowaniu zaleca się 50 m; ze względu na dużą energię lasera, użycie bliskiej odległości może spalić chip detektora, dlatego podczas debugowania należy zabrać ze sobą dobrą osłonę lustra, aby zapobiec spaleniu chipa detektora.
1. Opis zakresu zasięgu: zakres będzie się zmieniać w zależności od warunków testowych i celów testowych. Jeśli wykryjesz cele specjalne, skontaktuj się ze stroną sprzedaży w celu potwierdzenia;
2.Zasięg minimalny: wahania 30-100 m, po normalnym użytkowaniu zaleca się 50 m; ze względu na dużą energię lasera, użycie bliskiej odległości może spalić chip detektora, dlatego podczas debugowania należy zabrać ze sobą dobrą osłonę lustra, aby zapobiec spaleniu chipa detektora.
Schemat struktury mechanicznej
Interfejs zewnętrzny
| Szpilka | Definicja | Funkcjonować | Notatki |
| 1 | RX+ | Odbiornik RS422 + | Niebieski |
| 2 | TX+ | Odbiornik RS422 - | Zielony |
| 3 | TX- | Transmisja RS422 - | Fioletowy |
| 4 | TX+ | Transmisja RS422 + | Żółty |
| 5 | GND | Przewód uziemiający komunikacyjny | Biały |
| 6 | VEE | Zasilanie + | Czerwony |
| 7 | GND | Zasilanie - | Czarny |
| 8 | PWR PL | / | Popiół |
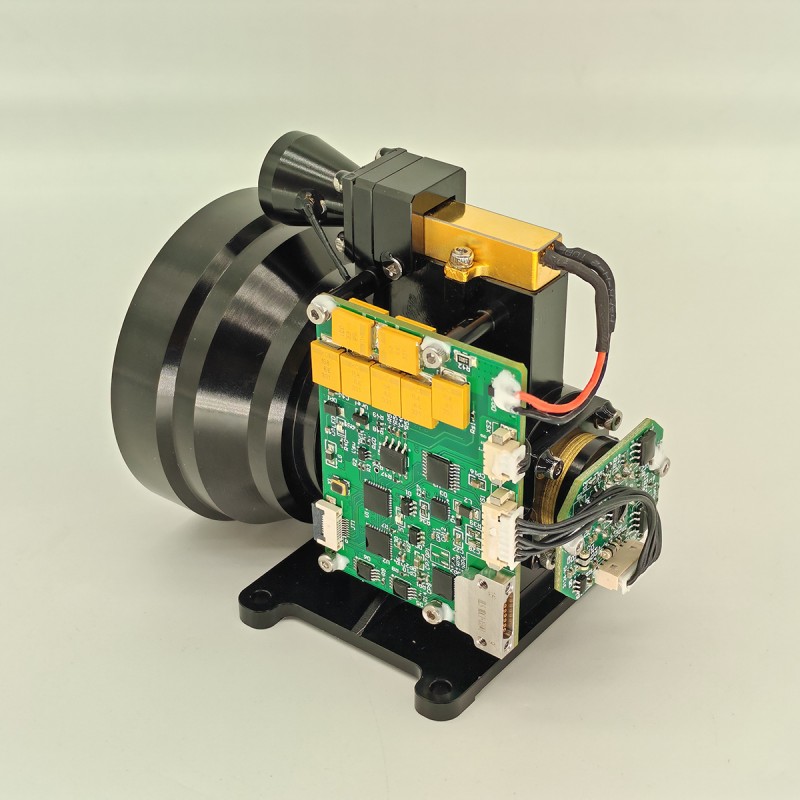
Laserowy moduł pomiaru odległości OEM/ODM o zasięgu 1–15 km do licznikowych bezzałogowych systemów powietrznych (C-UAS)
Protokół komunikacyjny
1. Protokół transmisji: asynchroniczna komunikacja szeregowa;
2. Szybkość portu: 115200;
3. Bity danych: 10 bitów: jeden bit startu, 8 bitów danych, jeden bit stopu, nieważna weryfikacja;
4. Struktura danych: Dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametrów i bajtu kontrolnego;
5. Tryb komunikacji: sterowanie główne wysyła polecenia sterujące do maszyny wyznaczającej odległość, a maszyna wyznaczająca odległość odbiera i wykonuje instrukcje. W stanie ustalania odległości maszyna wyznaczająca odległość wysyła dane i status maszyny wyznaczającej odległość z powrotem do górnego komputera zgodnie z cyklem wyznaczającym. Format komunikacji i treść poleceń przedstawiono w poniższej tabeli.
A) Wysyła główne sterowanie
2. Szybkość portu: 115200;
3. Bity danych: 10 bitów: jeden bit startu, 8 bitów danych, jeden bit stopu, nieważna weryfikacja;
4. Struktura danych: Dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametrów i bajtu kontrolnego;
5. Tryb komunikacji: sterowanie główne wysyła polecenia sterujące do maszyny wyznaczającej odległość, a maszyna wyznaczająca odległość odbiera i wykonuje instrukcje. W stanie ustalania odległości maszyna wyznaczająca odległość wysyła dane i status maszyny wyznaczającej odległość z powrotem do górnego komputera zgodnie z cyklem wyznaczającym. Format komunikacji i treść poleceń przedstawiono w poniższej tabeli.
A) Wysyła główne sterowanie
Format wysyłanej wiadomości jest następujący:
| STX0 | CMD | LEN | DANE 1H | DANE 1L | CHK |
Tabela 2 Opis formatu wysyłanej wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Flaga rozpoczęcia wiadomości | A5(H) |
|
| 2 | CMD | CW | Patrz tabela 3 |
|
| 3 | LEN | DL | Liczba wszystkich bajtów z wyjątkiem znaku początkowego, słowa polecenia i sumy kontrolnej |
|
| 4 | DANE | parametr | Patrz tabela 3 |
|
| 5 | przyjazd |
|
||
| 6 | CHK | Weryfikacja XOR | Z wyjątkiem prawidłowego bajtu, wszystkie pozostałe bajty są poddawane operacji XOR |
|
Polecenie jest opisane w następujący sposób:
Tabela 3 Opis poleceń i słów danych wysyłanych przez master do maszyny wyznaczającej odległość
Tabela 3 Opis poleceń i słów danych wysyłanych przez master do maszyny wyznaczającej odległość
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | długość | Przykładowy kod |
| 1 | 0x00 | przerwać | DANE=00(H) DANE=00(H) | Dalmierz przestaje mierzyć | Sześć bajtów | A5 00 02 00 00 A7 |
| 2 | 0x01 | Pojedynczy zakres | DANE=00(H) DANE=00(H) |
|
Sześć bajtów | A5 01 02 00 00 A6 |
| 3 | 0x02 | Ciągłe wahanie | DANE=XX(H)DANE=YY(H) | DATA opisuje okres wahań w ms | Sześć bajtów | A5 02 02 03 E8 4E (zakres 1 Hz) |
| 4 | 0x03 | samosprawdzenie | DANE=00(H) DANE=00(H) |
|
Sześć bajtów | A5 03 02 00 00 A4 |
| 5 | 0x04 | Ustaw najbliższą odległość do zaznaczenia | DANE=XX(H)DANE=YY(H) | DATA opisuje wartość strefy martwej, jednostka 1m | Sześć bajtów | A5 04 02 00 64 C7 (100 m to najbliższa odległość) |
| 6 | 0x06 | Łączna liczba zapytań dotyczących mocy świetlnej | DANE=00(H) DANE=00(H) | Łączna liczba zapytań dotyczących mocy świetlnej | Sześć bajtów | A5 01 02 00 00 A6 |
| 7 | 0x11 | Zasilanie APD jest włączone | DANE=00(H) DANE=00(H) |
|
Sześć bajtów | A5 11 02 00 00 B6 |
| 8 | 0x12 | Zasilanie APD jest wyłączone | DANE=00(H) DANE=00(H) |
|
Sześć bajtów | A5 12 02 00 00 B5 |
| 9 | 0xEB | Zapytanie o numer | DANE=00(H) DANE=00(H) | Zapytanie o numer | Sześć bajtów | A5 EB 02 00 00 4C |
a) Główna kontrola odbiera format
Format otrzymanej wiadomości jest następujący:
Format otrzymanej wiadomości jest następujący:
| STX0 | CMD | LEN | DANE | DATA0 | CHK |
Tabela 4 Opis formatu odbieranych wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Flaga rozpoczęcia wiadomości 1 | A5(H) |
|
| 2 | CMD_JG | Słowo polecenia danych | Patrz tabela 5 |
|
| 3 | LEN | DL | Liczba wszystkich bajtów z wyjątkiem znaku początkowego, słowa polecenia i sumy kontrolnej |
|
| 4 | Dn | parametr | Patrz tabela 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | Weryfikacja XOR | Z wyjątkiem prawidłowego bajtu, wszystkie pozostałe bajty są poddawane operacji XOR |
|
Opis statusu odbioru głównego sterowania:
Angle de divergence laser
Angle de divergence laser
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | Długość całkowita |
| 1 | 0x00 | przerwać | D1=00(H)D0=00(H) |
|
Sześć bajtów |
| 2 | 0x03 | samosprawdzenie | D8~D1 | D8-D7: napięcie -5V, jednostka 0,01V.D6-D5: wartość martwego punktu, jednostka 1mD4: wartość wysokiego napięcia APD, jednostka V;D3: typ char, wskazujący temperaturę APD, jednostka: stopnie Celsjusza;D2-D1: napięcie +5V, jednostka 0,01V | 12 bajtów |
| 3 | 0x04 | A5 04 02 00 64 C7 (100 m to najbliższa odległość) | D1 D0 | DANE opisują najbliższą wartość odległości, jednostkę 1 m; początek jest wysoki i koniec jest niski | Sześć bajtów |
| 4 | 0x06 | Łączna liczba zapytań dotyczących mocy świetlnej | D3~D0 | DATA wyraża liczbę świateł, 4 bajty, zaczynając od starszego bajtu | Siedem bajtów |
| 5 | 0x11 | Zasilanie APD jest włączone | D1=00(H)D0=00(H) | Zasilanie APD jest włączone | Sześć bajtów |
| 6 | 0x12 | Zasilanie APD wyłączone | D1=00(H)D0=00(H) | Zasilanie APD jest wyłączone | Sześć bajtów |
| 7 | 0xED | Praca w godzinach nadliczbowych | 0x00 0x00 | Laser znajduje się pod ochroną przed działaniem lasera i nie można go zmierzyć. | Sześć bajtów |
| 8 | 0xEE | Błędy efektywności | 0x00 0x00 |
|
Sześć bajtów |
| 9 | 0XEF | Przekroczono limit czasu komunikacji portu szeregowego | 0x00 0x00 |
|
Sześć bajtów |
| 10 | 0x01 | Pomiar pojedynczego zasięgu (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 odległość pierwszego celu (jednostka 0,1 m) D5-D3 odległość do drugiego celu (jednostka: 0,1 m) D2-D0 odległość trzeciego celu (jednostka 0,1 m)3. Cele znajdują się od blisko do daleko. Bajt flagi D9 (bit7-bit0):D9 to 7. pozycja wskazująca falę główną; 1: jest fala główna, 0: brak fali głównej. D9 to szósta pozycja wskazująca echo; 1: jest echo, 0: brak echaD9 Piąta pozycja wskazuje stan lasera; 1: normalny laser, 0: błąd lasera. D9 to czwarty bit flagi timeout, 1: normalny, 0: timeout D9 jest nieprawidłowy na 3. pozycji (ustawiony na 1);D9 Druga pozycja wskazuje status APD; 1: normalny, 0: błądD9 to pierwsza pozycja wskazująca, czy istnieje poprzedni cel; 1: istnieje poprzedni cel, 0: brak poprzedniego celu (cel w niewidocznym obszarze).D9 Bit 0 wskazuje, czy istnieje kolejny cel; 1: jest kolejny cel, 0: nie ma kolejnego celu (cel po celu głównym jest celem kolejnym) | 14 bajtów |
| 11 | 0x02 | Ciągły zakres (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 odległość pierwszego celu (jednostka 0,1 m) D5-D3 odległość do drugiego celu (jednostka: 0,1 m) D2-D0 odległość trzeciego celu (jednostka 0,1 m)3. Cele są od bliskiego do dalekiego. Bajt flagi D9 (bit7-bit0):D9 to siódmy bit wskazujący falę główną; 1: jest fala główna, 0: brak fali głównej. D9 to szósta pozycja wskazująca echo; 1: jest echo, 0: brak echaD9 Piąta pozycja wskazuje stan lasera; 1: normalny laser, 0: błąd lasera. D9 to czwarty bit flagi timeout, 1: normalny, 0: timeout D9 jest nieprawidłowy na 3. pozycji (ustawiony na 1);D9 Druga pozycja wskazuje stan APD; 1: normalny, 0: błądD9 to pierwsza pozycja wskazująca, czy istnieje poprzedni cel; 1: istnieje poprzedni cel, 0: brak poprzedniego celu (cel w niewidocznym obszarze).D9 Bit 0 wskazuje, czy istnieje kolejny cel; 1: jest kolejny cel, 0: nie ma kolejnego celu (cel po celu głównym jest celem kolejnym) | 14 bajtów |
| 12 | 0xEB | Zapytanie o numer | D17… D0 | D17 D16 D15 D14 D13 D12 Kod modelu całej maszynyD11D10 Numer produktuD9 Wersja oprogramowania D6D5 D4 Numer APDD3 D2 Numer laseraWersja D1 FPGA | 22 bajty |
| Uwaga: ① Niezdefiniowany bajt/bit danych, wartość domyślna to 0; | |||||
Gorące Tagi: Moduł dalmierza laserowego 2mrad 2km do mostka antydronowego, producenci, dostawcy, fabryka, Chiny, wyprodukowano w Chinach, dostosowane, wysoka jakość
Powiązana kategoria
Moduł dalmierza laserowego 905nm
Moduł dalmierza laserowego 1535nm
Moduł dalmierza laserowego 1570nm
1,54UM LASER MODULE
1064 Nm Laser Cel Desperator
Moduł anty -dronów
Zasięgowy moduł Lidar
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.