Dom
>
Produkty > Żyroskop światłowodowy > Żyroskop światłowodowy > Światłowodowy żyroskop przeciwmgielny Mems Inercyjna jednostka pomiarowa
Produkty
Nowe Produkty
 Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV- Wszystkie nowe produkty

Światłowodowy żyroskop przeciwmgielny Mems Inercyjna jednostka pomiarowa
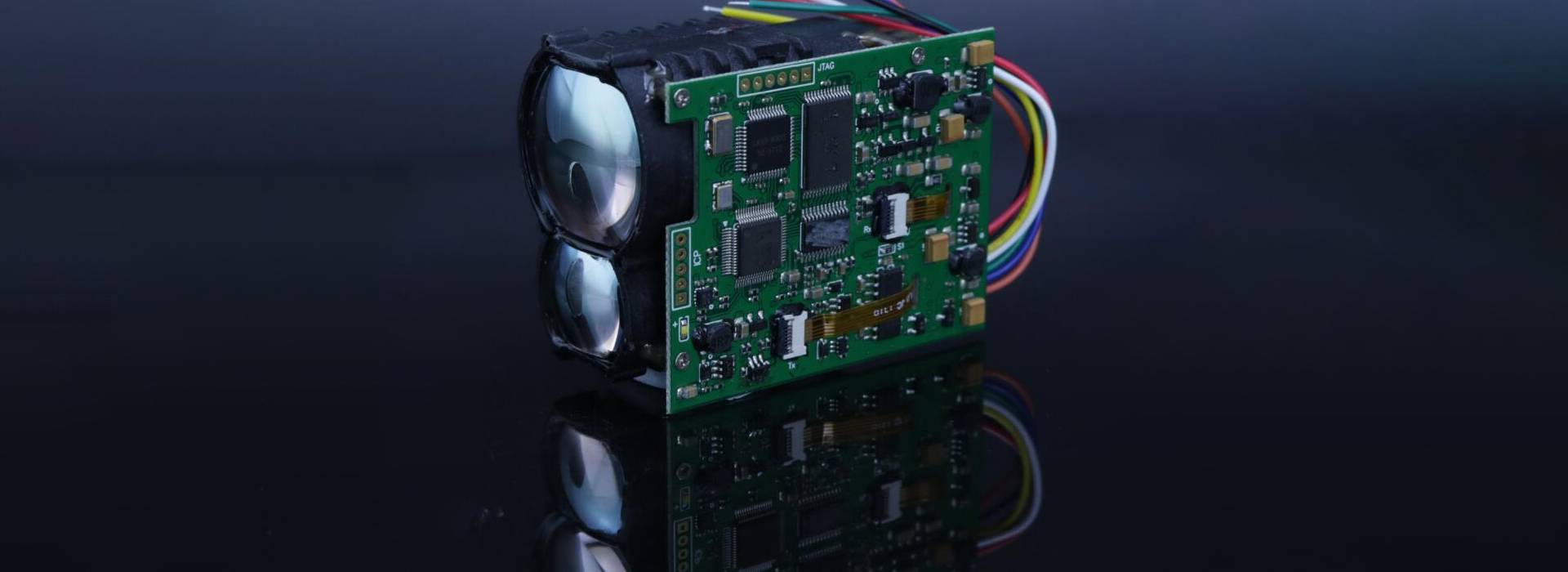
JIO-MC200-IMU to bezwładnościowa jednostka pomiarowa (IMU) oparta na technologii mikromechanicznej (MEMS) z wbudowanym wysokowydajnym żyroskopem MEMS i akcelerometrem MEMS, który wyprowadza prędkość kątową w 3 osiach i przyspieszenie w 3 osiach. Zapraszamy do zakupu światłowodowego żyroskopu przeciwmgielnego Mems Inercyjnej jednostki pomiarowej od nas.
Model:JIO-MC200-IMU
Wyślij zapytanie
Opis produktu
Światłowodowy żyroskop Fog Mems Inercyjny przegląd jednostek pomiarowych
JIO-MC200-IMU to bezwładnościowa jednostka pomiarowa (IMU) oparta na technologii mikromechanicznej (MEMS) z wbudowanym wysokowydajnym żyroskopem MEMS i akcelerometrem MEMS, który wyprowadza prędkość kątową w 3 osiach i przyspieszenie w 3 osiach.
JIO-MC200-IMU ma doskonałe zdolności adaptacyjne seksualne i środowiskowe. Dzięki dopasowaniu różnych programów produkty mogą być szeroko stosowane w amunicji kierowanej, taktycznych i przemysłowych UAV, bezzałogowych statkach powietrznych, poszukiwaczach, autonomicznej jeździe samochodem.
Instalacja żyroskopu światłowodowego JIOPTICS w celu zapewnienia łatwości integracji i elastyczności, a zestaw narzędzi naszych programistów do szybkiego prototypowania, nie tylko spełnia wymagania specyfikacji, ale także zapewnia wysoką jakość działania spełniającą wymagania użytkowników końcowych.
JIO-MC200-IMU ma doskonałe zdolności adaptacyjne seksualne i środowiskowe. Dzięki dopasowaniu różnych programów produkty mogą być szeroko stosowane w amunicji kierowanej, taktycznych i przemysłowych UAV, bezzałogowych statkach powietrznych, poszukiwaczach, autonomicznej jeździe samochodem.
Instalacja żyroskopu światłowodowego JIOPTICS w celu zapewnienia łatwości integracji i elastyczności, a zestaw narzędzi naszych programistów do szybkiego prototypowania, nie tylko spełnia wymagania specyfikacji, ale także zapewnia wysoką jakość działania spełniającą wymagania użytkowników końcowych.
Nasze Usługi
JIOPTICS to profesjonalny i sprawny zespół. Zapewnij usługi OEM/ODM, skontaktuj się z nami, aby dostosować swój ekskluzywny żyroskop światłowodowy
cechy produktu
1) trójosiowy żyroskop cyfrowy:
a) dynamiczny zakres pomiarowy ±450º/s;
b) Stabilność przy zerowym odchyleniu: 20°/h (GJB,10S);
2) trójosiowy cyfrowy akcelerometr:
a) dynamiczny zakres pomiarowy ±16g;
b) stabilność przy zerowym odchyleniu: 0,5 mg (GJB,10S);
3) Wysoka niezawodność: MTBF
4) Pełny zakres temperatur (-40°C ~ 70°C) zapewniający dokładność: wbudowany wysokowydajny algorytm kalibracji i kompensacji temperatury;
5) Nadaje się do pracy w warunkach silnych wibracji;
6) interfejs 1 sposób UART
a) dynamiczny zakres pomiarowy ±450º/s;
b) Stabilność przy zerowym odchyleniu: 20°/h (GJB,10S);
2) trójosiowy cyfrowy akcelerometr:
a) dynamiczny zakres pomiarowy ±16g;
b) stabilność przy zerowym odchyleniu: 0,5 mg (GJB,10S);
3) Wysoka niezawodność: MTBF
4) Pełny zakres temperatur (-40°C ~ 70°C) zapewniający dokładność: wbudowany wysokowydajny algorytm kalibracji i kompensacji temperatury;
5) Nadaje się do pracy w warunkach silnych wibracji;
6) interfejs 1 sposób UART
Pole aplikacji
1) amunicja kierowana
2) Poszukiwacz
3)Drony taktyczne i przemysłowe
4) Autopilota
2) Poszukiwacz
3)Drony taktyczne i przemysłowe
4) Autopilota
Parametry elektryczne
- Zasilanie: szerokie wejście napięciowe 12~36V
- Moc znamionowa: 24 W (maks.)
- Moc znamionowa: 24 W (maks.)
Metryki produktu
| Parametry |
Test kondycji |
Minimum |
Typowa wartość |
Maksymalna wartość |
Jednostki |
|
| Żyroskop |
Dynamiczny zakres pomiarowy |
|
|
450 |
|
°/s |
| Zerowa stabilność stronniczości |
Średnia z 10 s (-40°C ~ 70°C, stała temperatura) |
|
20 |
|
°/godz. |
|
| Zero uprzedzeń |
Zakres zerowego obciążenia |
|
/ - 0,2 |
|
°/s |
|
| Zerowe odchylenie â w całym zakresie temperatur |
|
/ - 0,1 |
|
°/s |
||
| Powtarzalność dla kolejnych uruchomień, oś Z |
|
30 |
|
°/godz. |
||
| Wpływ przyspieszenia liniowego na zerowe odchylenie |
|
10 |
|
°/h/g |
||
| Wibracje â¡ przy zerowym efekcie odchylenia, przed i po zmianie wibracji |
|
10 |
|
°/h/g |
||
| Wibracja â¡ do zerowego efektu odchylenia, wibracja po zmianie wibracji |
|
10 |
|
°/h/g |
||
| Współczynnik skali |
Współczynnik skali jest nieliniowy |
|
500 |
|
ppm |
|
| Dokładność współczynnika skali |
|
2000 |
|
ppm |
||
| Gęstość szumów |
|
|
0.003 |
|
° / Hz/s) |
|
| Rezolucja |
|
|
3,052 x 10–7 |
|
°/s/LSB |
|
| Akcelerometr |
Dynamiczny zakres pomiarowy |
|
|
16 |
|
g |
| Zerowa stabilność stronniczości |
Średnia z 10 s (-40°C ~ 70°C, stała temperatura) |
|
0.5 |
|
mg |
|
| Zero uprzedzeń |
Zakres zerowego obciążenia |
|
5 |
|
mg |
|
| Zerowe odchylenie w całym zakresie temperatur |
|
5 |
|
mg |
||
| Powtarzalność kolejnych startów |
|
0.5 |
|
mg |
||
| Współczynnik skali |
Współczynnik skali jest nieliniowy |
|
500 |
|
ppm |
|
| Dokładność współczynnika skali |
|
2000 |
|
ppm |
||
| Gęstość szumów |
|
|
0.05 |
|
Hz/mg) |
|
| Rezolucja |
|
|
1,221 x 10–8 |
|
g/LSB |
|
| Inny |
Czas uruchamiania |
|
|
2 |
|
s |
| Parametry |
Test kondycji |
Minimum |
typowy |
wartość |
maksymalna wartość |
jednostki |
| nieruchomości |
Przepustowość łącza |
|
|
200 |
|
Hz |
| Opóźnienie |
|
|
10 |
|
SM |
|
| Interfejs komunikacyjny |
1 sposób UART |
Szybkość transmisji |
|
460.8 |
|
Kb/s |
| Częstotliwość próbkowania |
UART |
|
500 |
|
Hz |
|
| Parametry elektryczne |
Napięcie |
|
4.8 |
5 |
5.2 |
V |
| Pobór energii |
|
|
1.5 |
|
W |
|
| Marszczyć |
P-P |
|
100 |
|
mV |
|
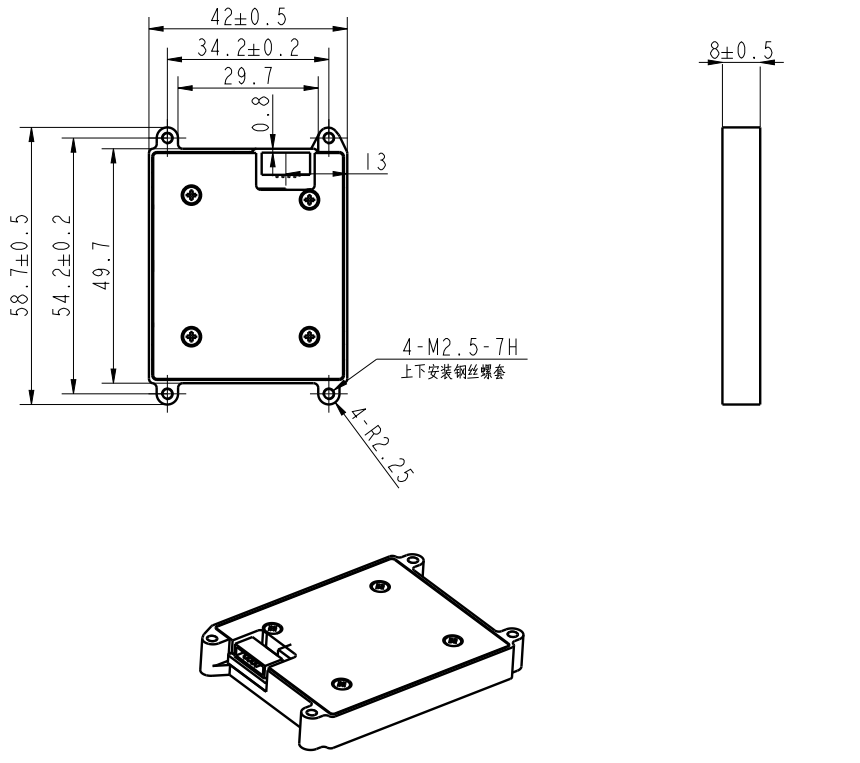
| Charakterystyka strukturalna |
Rozmiar |
|
|
58,7 x 42 x 8 |
|
mm |
| Waga |
|
|
35 |
|
g |
|
| Środowisko użytkowania |
Temperatura robocza |
|
- 40 |
|
70 |
℃ |
| Temperatura przechowywania |
|
- 45 |
|
75 |
℃ |
|
| Wibracja |
|
|
20 do 2000 Hz, 6,06 g |
|
|
|
| Uderzenie |
|
|
500g |
|
|
|
| Środowisko użytkowania |
MTBF |
|
|
20000 |
|
h |
| Ciągłe godziny pracy |
|
|
120 |
|
h |
|
| â : Oblicz zerowe odchylenie całego procesu zmiany temperatury, szybkość zmiany temperatury ≤ 1℃/min, zakres temperatur -40℃~ 70℃; â¡: stan wibracji wynosi 6,06 g, 20 Hz ~ 2000 Hz |
||||||
Interfejs elektryczny
Typ złącza: A1251WR-S-4P;
Punkty połączeń są zdefiniowane w poniższej tabeli:
Punkty połączeń są zdefiniowane w poniższej tabeli:
| Szpilki |
Definicja |
Funkcje |
Uwagi |
|
1 |
5V |
Wejście prądu stałego |
|
|
2 |
GND |
Do |
|
|
3 |
TX LV-TTL |
Wysyłanie portu szeregowego |
3,3 V |
|
4 |
RX LV-TTL |
Odbiór portu szeregowego |
3,3 V |
Interfejs oprogramowania
Szybkość transmisji: 460800bps;
Częstotliwość wysyłania: 500Hz;
Format danych: bit danych 8, bit stopu 1, brak bitu parzystości;
Gdy dane są przesyłane, jest niski, a następnie wysoki.
Protokoły komunikacyjne przedstawiono w poniższej tabeli:
Częstotliwość wysyłania: 500Hz;
Format danych: bit danych 8, bit stopu 1, brak bitu parzystości;
Gdy dane są przesyłane, jest niski, a następnie wysoki.
Protokoły komunikacyjne przedstawiono w poniższej tabeli:
| bajt |
Dane |
Formularz |
Rezolucja |
Uwagi |
|
1 |
0x5A |
Uint8 |
|
|
|
2 |
0x5A |
Uint8 |
|
|
| 3-6 |
Szybkość kątowa X |
platforma |
|
|
| 7-10 |
Szybkość kątowa Y |
platforma |
|
|
| 11-14 |
Szybkość kątowa Z |
platforma |
|
|
| 15-18 |
Szybkość kątowa X |
platforma |
|
|
| 19-22 |
Szybkość kątowa Y |
platforma |
|
|
| 23-26 |
Szybkość kątowa Z |
platforma |
|
|
| 27-30 |
Skryty |
Uint8 |
|
|
|
31 |
Temperatura |
int8 |
1 |
Zakres: -128 do 127 |
|
32 |
I zaznacz |
Uint8 |
|
1-31 bajtów sumuje się i zajmuje 8 bitów mniej |
Interfejs strukturalny
Gorące Tagi: Światłowodowy żyroskop Mgła Mems Inercyjna jednostka pomiarowa, producenci, dostawcy, fabryka, Chiny, Made in China, dostosowane, wysoka jakość
Powiązana kategoria
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.
Produkty powiązane