Dom
>
Produkty > Żyroskop światłowodowy > Żyroskop światłowodowy > Zintegrowany system nawigacji gyroskopu światłowodowego i zintegrowany system nawigacji GNSS
Produkty
Nowe Produkty
 Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV- Wszystkie nowe produkty

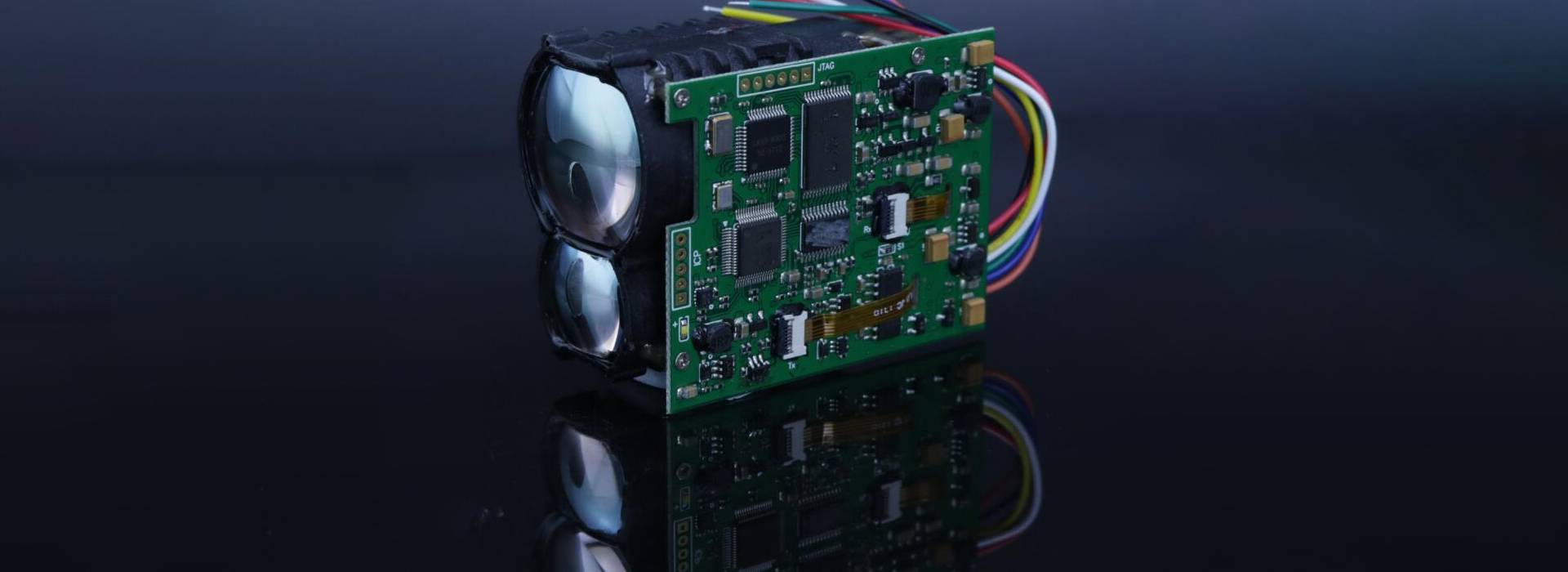
Zintegrowany system nawigacji gyroskopu światłowodowego i zintegrowany system nawigacji GNSS
Zintegrowany system nawigacji gyroskopu światłowodowego i zintegrowany system nawigacji GNSS Jio-D300S oparty jest na opłacalnym żyroskopie światłowodowej w zamkniętej pętli światłowodowej, akcelerometrze i wysokiej jakości płycie GNSS, poprzez roztwór z wieloma sensorami i roztwór nawigacyjny algorytmiczny algorytmiczny algorytm. Informacje o pozycji.
Model:JIO-D300S
Wyślij zapytanie
Opis produktu
Zintegrowany system nawigacji gyroskopu światłowodowego i zintegrowany system nawigacji GNSS ma połączony tryb nawigacji bezwładności/satelitarnych i czysty tryb bezwładności.
Satelity, które mogą być odbierane przez odbiornik GNSS w zintegrowanym trybie nawigacyjnym bezwładności/satelitarnym informacje o pozycjonowaniu satelitarnym do łącznej nawigacji; wyjściowe pozycja roztworu bezwładności po utracie nastawienia prędkości sygnału, z dokładnością pozycjonowania na poziomie miernika w krótkim czasie.
Po uruchomieniu trybu czystej bezwładności ma funkcję dokładnego pomiaru nastawienia i może wyjść z przewracaniem i nagłówkiem, czystą bezwładność może statycznie szukać na północ.
Instalacja jioptics gyroskopu światłowodowego w celu zapewnienia łatwości elastyczności integracji, a nasz narzędziu do szybkiego prototypowania, nie tylko spełnia wymagania specyfikacji, zapewniają również wysokiej jakości wydajność zaspokojenia zapotrzebowania użytkowników końcowych.
Satelity, które mogą być odbierane przez odbiornik GNSS w zintegrowanym trybie nawigacyjnym bezwładności/satelitarnym informacje o pozycjonowaniu satelitarnym do łącznej nawigacji; wyjściowe pozycja roztworu bezwładności po utracie nastawienia prędkości sygnału, z dokładnością pozycjonowania na poziomie miernika w krótkim czasie.
Po uruchomieniu trybu czystej bezwładności ma funkcję dokładnego pomiaru nastawienia i może wyjść z przewracaniem i nagłówkiem, czystą bezwładność może statycznie szukać na północ.
Instalacja jioptics gyroskopu światłowodowego w celu zapewnienia łatwości elastyczności integracji, a nasz narzędziu do szybkiego prototypowania, nie tylko spełnia wymagania specyfikacji, zapewniają również wysokiej jakości wydajność zaspokojenia zapotrzebowania użytkowników końcowych.
Nasze usługi
Jioptics to profesjonalny i wydajny zespół. Zapewnij Ci usługi OEM/ODM, skontaktuj się z nami, aby dostosować ekskluzywny żyroskop światłowodowy
Funkcje produktu
- Dokładność pozycji do poziomu centymetra
- Błąd pomiaru postawy lepszy niż 0,01 °
- Zakres temperatur roboczych: -40 ~ 60 ℃
- Środowisko wibracji: 20 ~ 2000 Hz, 3,03 g
- Rogie typy interfejsów, obsługa RS232, RS422, CAN i innych standardowych interfejsów
- Średni czas między awarią do 30000H
- Błąd pomiaru postawy lepszy niż 0,01 °
- Zakres temperatur roboczych: -40 ~ 60 ℃
- Środowisko wibracji: 20 ~ 2000 Hz, 3,03 g
- Rogie typy interfejsów, obsługa RS232, RS422, CAN i innych standardowych interfejsów
- Średni czas między awarią do 30000H
Charakterystyka elektryczna
- Zasilanie: Wejście szerokiego napięcia 12 ~ 36 V
- Power znamionowy: 24 W (maks.)
- Power znamionowy: 24 W (maks.)
Wymiary mechaniczne

Wskaźniki techniczne
| Parametr | Atrybuty | Typowa wartość | Jednostka |
| Dokładność pozycji | Pojedynczy punkt (RMS) | 1.2 | m |
| RTK (RMS) | 2 cm+1ppm |
|
|
| Przetwarzanie końcowe (RMS) | 1 cm+1ppm |
|
|
| Utrata dokładności blokady (CEP) | 2nm① |
|
|
| Nagłówek (RMS) | Połączona dokładność | 0,1② | º |
| Przetwarzanie końcowe | 0.01 | º | |
| Utrata dokładności zatrzymania zamka | 0,02① | º | |
| Dokładność poszukiwania na północ | 0,2③ | º Secl | |
| Postawa (RMS) | Połączona dokładność | 0.01 | º |
| Przetwarzanie końcowe | 0.006 | º | |
| Utrata dokładności zatrzymania zamka | 0,02① | º | |
| Dokładność prędkości poziomej (RMS) |
|
0.05 | SM |
| Dokładność czasu |
|
20 | ns |
| Częstotliwość wyjścia danych |
|
200④ | Hz |
| Gyro | Zakres | 300 | º / s |
| Zero stabilność stronniczości | 0,02⑤ | º/h | |
| Współczynnik skali | 50 | ppm | |
| Randomiczny spacer narożny | 0.005 | º/√hr | |
| Akcelerometr | Zakres | 16 | g |
|
|
Zero stabilność stronniczości | 50⑤ | μg |
| Współczynnik skali | 50 | ppm | |
| Speed Losowy spacer | 0.01 | m/s/√hr |
Speed Losowy spacer
| Parametr | Atrybuty | Odniesienie | Jednostka |
| Rozmiar fizyczny | Rozmiar | 176,8 × 188,8 × 117 | MM3 |
| Waga | <5 | kg | |
| Charakterystyka elektryczna | Napięcie znamionowe | 12 ~ 36 | V |
| Power oceniany | 24 (stan ustalony) | W | |
| Pamięć | Skryty |
|
|
| Wskaźniki środowiskowe | Temperatura robocza | -40 ~+60 | ℃ |
| Temperatura przechowywania | -45 ~+70 | ℃ | |
| Losowa wibracja | 3,03 (20 ~ 2000 Hz) | g | |
| MTBF | 30000 | h | |
| Funkcje interfejsu |
|
PPS, zdarzenie, RS232, RS422, może (opcjonalnie) |
|
|
|
Port sieciowy (zarezerwowany), port antenowy, port czujnika prędkości koła |
|
|
| Notatka: ① Wyrównanie jest ważne, a zamek jest tracony przez 60 minut; Warunki Vehicle, muszą być manewrowane; ③ Wyrównanie pozycji Dwu, 15 minut, różnica między dwiema pozycjami jest większa niż 90 stopni; ④ Pojedyncze wyjście 200 Hz; ⑤10s średnia. |
|||
Gorące Tagi: Zintegrowany system nawigacji gyroskopu światłowodowego i zintegrowany system nawigacji GNSS, producenci, dostawcy, fabryka, Chiny, wykonane w Chinach, dostosowane, wysokiej jakości
Powiązana kategoria
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.
Produkty powiązane