Dom
>
Produkty > Moduł dalmierza laserowego > 1064 Nm Laser Cel Desperator > 45MJ Laser Target Designator (LTD) Wiht LRF
Produkty
Nowe Produkty
 Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 45 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 24 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 13 mm do drona FPV Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV
Kamera termowizyjna z obiektywem 640x512 i obiektywem 9,1 mm do drona FPV- Wszystkie nowe produkty
 Wiht LRF")
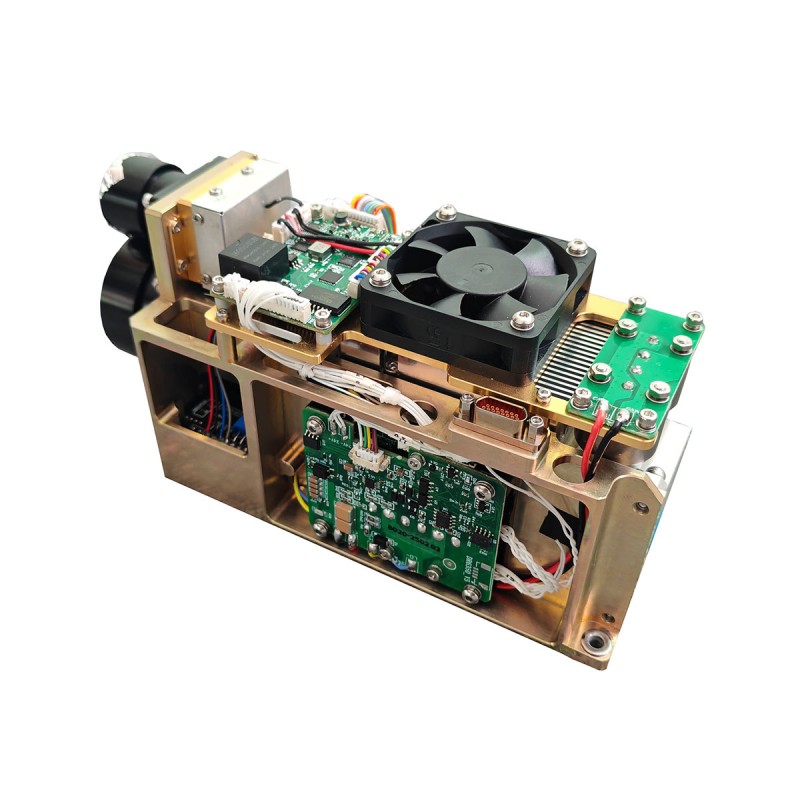
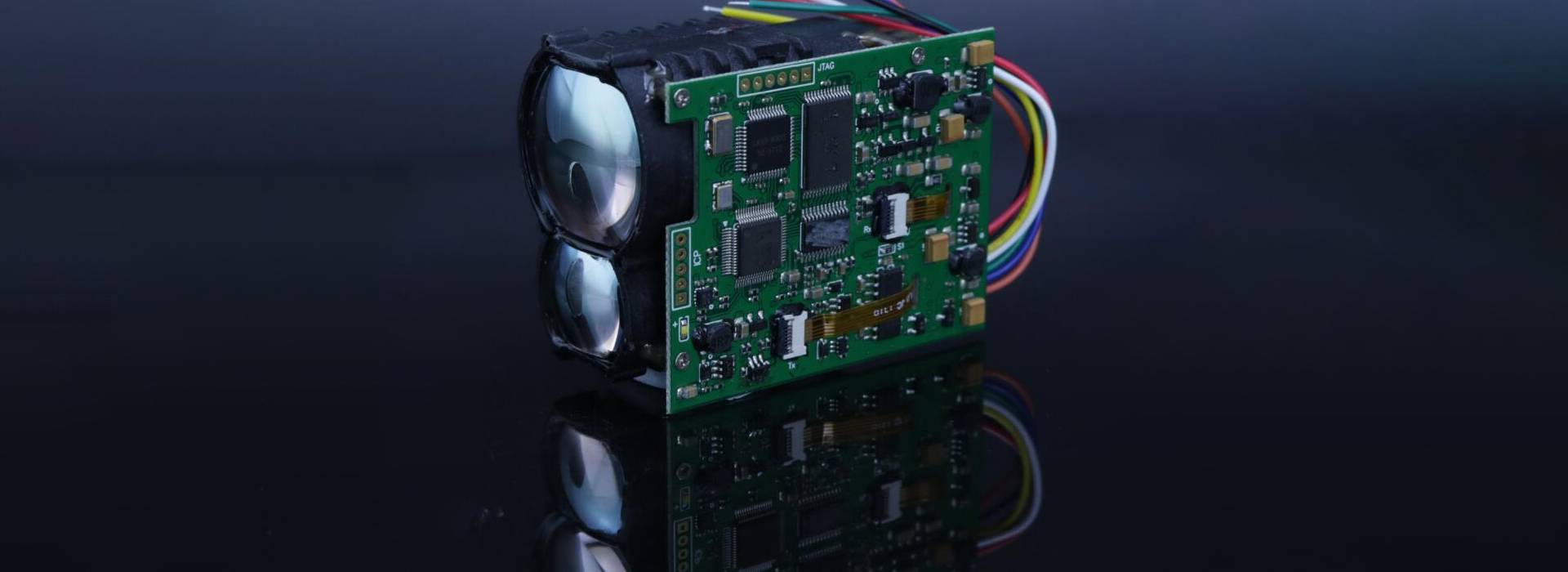
45MJ Laser Target Designator (LTD) Wiht LRF
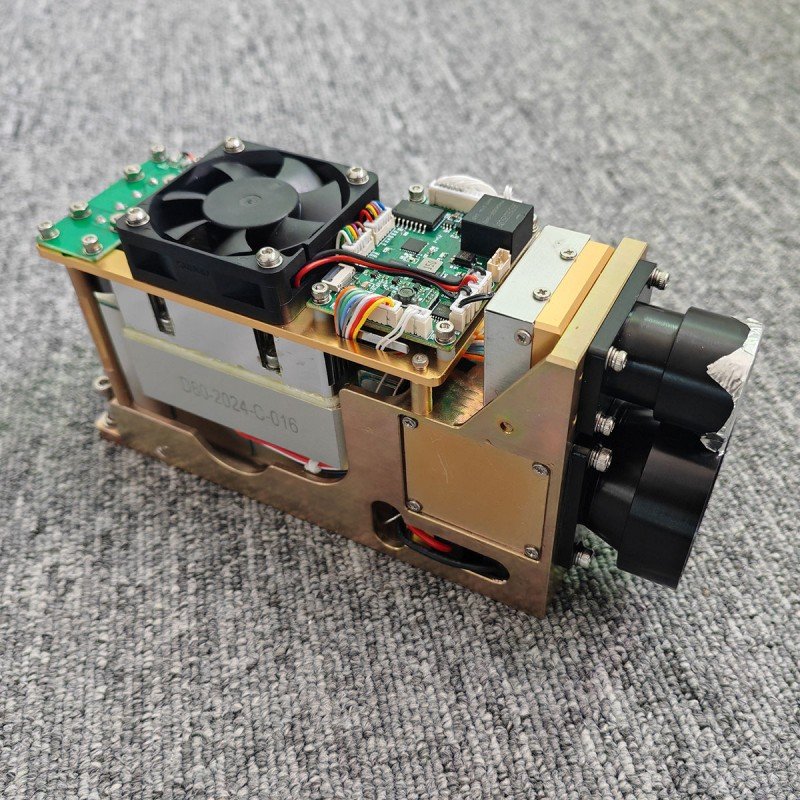
STA-B45M to wojskowy desygnator docelowego laserowego 45 MJ, który odgrywa kluczową rolę w precyzyjnych systemach celowania, zdolnych do zapewnienia precyzyjnych wskazówek dla inteligentnej amunicji. Za pośrednictwem zaawansowanego systemu optycznego oznacza cel wiązką laserową, zapewniając, że broń przewodnicząca może zniszczyć cel z wyjątkowo wysoką dokładnością i wydajnością.
Wyślij zapytanie
Opis produktu
Funkcje produktu
Lekkie i zminiaturyzowane
Zdolność do adaptacji środowiskowej: -40 ℃ ~ 60 ℃ W szerokim temperaturze zdolność adaptacji
Zdolność do adaptacji środowiskowej: -40 ℃ ~ 60 ℃ W szerokim temperaturze zdolność adaptacji
Parametry wskaźnika rdzenia
Funkcjonować
a) Funkcja ustawienia cyklu napromieniowania i może wykonywać napromieniowanie laserowe zgodnie z cyklem zestawu.
b) Wyposażone w laserowe funkcje pojedyncze i powtarzające się.
c) Wyposażony w funkcję wielopasmową.
D) Wyposażony w funkcję wyjściową temperatury dla elementów rdzenia aparatu.
e) Wyposażony w funkcję ochrony przegrzania dla urządzenia pomiarowego.
f) Wyposażony w funkcję wyświetlania informacji o stanie urządzenia oświetleniowego.
a) Funkcja ustawienia cyklu napromieniowania i może wykonywać napromieniowanie laserowe zgodnie z cyklem zestawu.
b) Wyposażone w laserowe funkcje pojedyncze i powtarzające się.
c) Wyposażony w funkcję wielopasmową.
D) Wyposażony w funkcję wyjściową temperatury dla elementów rdzenia aparatu.
e) Wyposażony w funkcję ochrony przegrzania dla urządzenia pomiarowego.
f) Wyposażony w funkcję wyświetlania informacji o stanie urządzenia oświetleniowego.
Parametry techniczne
| Model | STA-B6445M |
| Długość fali laserowej | 1.06um (przy użyciu ND: YAG Crystal, Gwarancja wyboru projektu) |
| Średnia energia laserowa | ≥ 45 MJ (fluktuacje energii ≤ ± 8%); |
| Kąt rozbieżności laserowej | 0,5 Mrad |
| stabilność osi optycznej osi laserowej | ≤ 0,05 Mrad |
| Oś optyczna emisji laserowej i instalacja płaszczyzny podstawowej nie jest równoległa | ≤ 3 '(gwarancja projektowa); |
| Szerokość impulsu laserowego | 10ns ~ 22ns |
| Max w zakresie | Widoczność ≥ 12 km, maksymalny zakres do pomiaru celów NATO ≥ 6 km; |
| Mini rozdział | 100m |
| Odsąd powtarzający się częstotliwość | 1Hz/5Hz/singiel |
| Dokładność w zakresie | ≤ ± 2m (RMS) |
| Dokładność w zakresie | ≥ 98% |
| Rozdzielczość odległości | ≤ 50m |
| Ciągły czas pracy | 5min (5 Hz: praca ciągła 5 minut, spoczynku ≤ 3 min, może nadal się zakresy). |
| Maksymalna odległość napromieniowania | ≥ 5 km |
| Minimalna odległość napromieniowania | ≤ 500 m (z oceną systemu) |
| Ciągły cykl napromieniowania | 8, każdy cykl trwa 25s, z odstępem 15S; Po 8 cyklach interwał spoczynku ≤ 20 min; |
| Okres kodu lasera (ustawiony według protokołu komunikacji) | Zakres ustawienia 40 ms ~ 100 ms |
| Dokładność czasu kodowania laserowego | ≤ ± 2 μs |
| Laserowy czas uruchamiania | ≤3 min |
| Funkcja synchronizacji dodatkowej kodu | Tak |
| Temperatura pracy: | -40 ~+60 ℃ |
| Temperatura przechowywania | -50 ~+70 ℃ |
| Waga | ≤580g |
| Moduł dla Ciebie | 138x75x50 mm |
| z możliwością pomiaru wielu celów i zwracaj trzy wartość wielopasmową, z funkcją selektywnej odległości. Kod częstotliwości i kod przedziału zmiennego można ustawić (ustawione według protokołu komunikacji). | |
Przygotowanie do użycia
Sprawdź, czy napięcie zasilania wynosi od 18 V do 32 V. Gdy napięcie jest zbyt niskie (mniej niż 18 V), w zakresie nie może komunikować się poprawnie ani wskazywać „bez wyjścia lasera”, a gdy napięcie jest zbyt wysokie (więcej niż 32V), cały iluminator może zostać trwale uszkodzony. Upewnij się, że znamionowy prąd wyjściowy systemu zasilacza jest większy niż 6a, jeśli jest mniejszy niż ta wartość, może nie być lasera podczas pracy. Upewnij się, że biegunowość zasilacza jest prawidłowo połączona, istnieje ryzyko uszkodzenia sprzętu, jeśli polaryczność zostanie odwrócona. Definicje gniazda zasilania znajdują się w załączniku A.
Środki ostrożności do użytku
A) Laser emitowany przez ten zakres wrzasny jest laserem o długości fali o długości 1,06 µm, unikaj bezpośredniego światła lasera do oczu.
b) Podczas regulacji równoległości osi optycznej pamiętaj o blokowaniu soczewki odbiorczej, w przeciwnym razie detektor zostanie trwale uszkodzony z powodu silnego echa.
c) Ten moduł Rangefinder jest nieistniejący, pamiętaj, aby użyć wilgotności względnej środowiska jest mniejsza niż 80%i upewnij się, że stosowanie czystości środowiska i higieny, aby nie uszkodzić lasera.
D) Zakres wrzaszynce jest związany z widocznością atmosferyczną i charakterem celu, w przypadku mgły, deszczu i wiatru i piasku zmniejszy zasięg. Cele, takie jak klastry zielonych liści, białe ściany i odsłonięty wapień mają lepszy współczynnik odbicia i mogą zwiększać zasięg. Ponadto wzrost nachylenia celu do wiązki laserowej zmniejszy zakres.
e) Sądnie zabronione jest wystrzelenie wiązki laserowej na silnie odblaskowych celach, takich jak szklane i białe ściany w odległości 100 metrów, aby uniknąć silnych echa, które mogą powodować uszkodzenie detektora APD.
f) Jest surowo zabronione odłączanie lub podłączenie kabla podczas jego energii.
g) Upewnij się, że polaryzacja mocy jest prawidłowo podłączona, w przeciwnym razie doprowadzi ona do trwałego uszkodzenia urządzenia.
b) Podczas regulacji równoległości osi optycznej pamiętaj o blokowaniu soczewki odbiorczej, w przeciwnym razie detektor zostanie trwale uszkodzony z powodu silnego echa.
c) Ten moduł Rangefinder jest nieistniejący, pamiętaj, aby użyć wilgotności względnej środowiska jest mniejsza niż 80%i upewnij się, że stosowanie czystości środowiska i higieny, aby nie uszkodzić lasera.
D) Zakres wrzaszynce jest związany z widocznością atmosferyczną i charakterem celu, w przypadku mgły, deszczu i wiatru i piasku zmniejszy zasięg. Cele, takie jak klastry zielonych liści, białe ściany i odsłonięty wapień mają lepszy współczynnik odbicia i mogą zwiększać zasięg. Ponadto wzrost nachylenia celu do wiązki laserowej zmniejszy zakres.
e) Sądnie zabronione jest wystrzelenie wiązki laserowej na silnie odblaskowych celach, takich jak szklane i białe ściany w odległości 100 metrów, aby uniknąć silnych echa, które mogą powodować uszkodzenie detektora APD.
f) Jest surowo zabronione odłączanie lub podłączenie kabla podczas jego energii.
g) Upewnij się, że polaryzacja mocy jest prawidłowo podłączona, w przeciwnym razie doprowadzi ona do trwałego uszkodzenia urządzenia.
Definicja gniazd interfejsu
Tabela 1 Definicja interfejsów zewnętrznych
Tabela 1 Definicja interfejsów zewnętrznych
| Numer zamówienia | Typ interfejsu | Pigment | Definicja | Uwagi |
| 1 | Definicja interfejsu DB9 | Palma | RS422 T+ | Interfejs komunikacyjny RS422 |
| 2 | Fioletowy | RS422 T- | ||
| 3 | Żółty | Rs422 r- | ||
| 4 | Zielony | RS422 R+ | ||
| 5 | Biały | GND | ||
| 6 | Popiół | Zewnętrzny spust- | Poziom RS422 | |
| 7 | Niebieski | Zewnętrzny spust + | ||
| 8 | Definicja interfejsu mocy | Czarny | VCC+ | DC 18V ~ 32V |
| 9 | Czerwony | Vcc- |
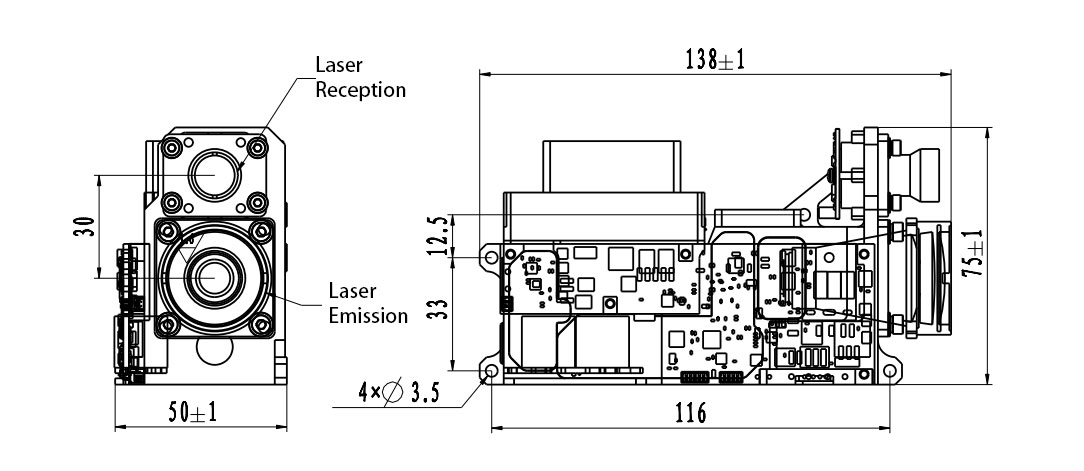
Rysunek 2 Dwuwymiarowy schemat wielkości produktu
Protokół komunikacji interfejsu
1. Format komunikacji:
a) Domyślna wskaźnik transmisji wynosi 115200 b / s.
b) Format danych: 8-bitowe dane, jeden bit startowy, jeden bit stopu, brak kontroli parytetu, dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametru i bajtu sprawdzania.
2. Tryb komunikacji:
a) Master i urządzenie pomiarowe używają trybu komunikacji głównego, w którym Master wysyła polecenia sterujące do urządzenia pomiarowego, a urządzenie pomiarowe odbiera i wykonuje instrukcje. W stanie dystansowym urządzenie pomiarowe wysyła dane i status urządzenia pomiarowego z powrotem do górnego komputera zgodnie z okresem dystansowym, a format komunikacji i zawartość poleceń pokazano w poniższej tabeli.
b) Po wysłaniu komendy sterowania miernik ciągle odpowiada trzema poleceniami odpowiedzi. Jeśli Master nie otrzyma polecenia odpowiedzi z miernika w ramach limitu czasu, ponownie go ponownie.
Format wiadomości, który ma zostać wysłany, jest następujący
a) Domyślna wskaźnik transmisji wynosi 115200 b / s.
b) Format danych: 8-bitowe dane, jeden bit startowy, jeden bit stopu, brak kontroli parytetu, dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametru i bajtu sprawdzania.
2. Tryb komunikacji:
a) Master i urządzenie pomiarowe używają trybu komunikacji głównego, w którym Master wysyła polecenia sterujące do urządzenia pomiarowego, a urządzenie pomiarowe odbiera i wykonuje instrukcje. W stanie dystansowym urządzenie pomiarowe wysyła dane i status urządzenia pomiarowego z powrotem do górnego komputera zgodnie z okresem dystansowym, a format komunikacji i zawartość poleceń pokazano w poniższej tabeli.
b) Po wysłaniu komendy sterowania miernik ciągle odpowiada trzema poleceniami odpowiedzi. Jeśli Master nie otrzyma polecenia odpowiedzi z miernika w ramach limitu czasu, ponownie go ponownie.
Format wiadomości, który ma zostać wysłany, jest następujący
| STX0 | CMD | Len | Data1h | Data1l | Chk |
Tabela 2 Opis formatu wysłanej wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Wiadomość Flaga Start | 55 (h) |
|
| 2 | CMD | CW | Patrz Tabela 3 |
|
| 3 | Len | Dl | Liczba wszystkich bajtów oprócz znaku początkowego, słowa polecenia i sumy kontrolnej |
|
| 4 | Datah | parametr | Patrz Tabela 3 |
|
| 5 | przyjazd |
|
||
| 6 | Chk | Weryfikacja XOR | Z wyjątkiem ważnego bajtu, wszystkie pozostałe bajty są XORED |
|
Polecenie jest opisane w następujący sposób:
Tabela 3 Opis poleceń i słów danych wysłanych przez Master do miernika
Tabela 3 Opis poleceń i słów danych wysłanych przez Master do miernika
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | długość | Przykładowy kod |
| 1 | 0x00 | Stop (przestań oświetlenie) | D1 = 00 (H) D0 = 00 (H) |
|
Sześć bajtów | 55 00 02 00 00 57 |
| 2 | 0x01 | Pojedynczy oddział | D1 = 00 (H) D0 = 00 (H) | Urządzenie pomiarowe odbiera jednocześnie instrukcję dystansową, wykonuje operację i przesyła wartość odległości odległości w tym samym czasie; | Sześć bajtów | 55 01 02 00 00 56 |
| 3 | 0x02 | Ciągły odległość | D1 = xx (h) d0 = yy (h) | Zgodnie z ustalonym okresem, wartość odległości odległości jest przesyłana w sposób ciągły. Dane wyrażają okres rozmieszczenia, a jednostką jest MS | Sześć bajtów | 55 02 02 03 E8 BE (1Hz Dystrybuting) |
| 4 | 0x03 | samoocena | D1 = 00 (H) D0 = 00 (H) |
|
Sześć bajtów | 55 03 02 00 00 54 |
| 5 | 0x04 | Konfiguracja stref niewidomych | D1 = xx (h) d0 = yy (h) | Dane opisują wartość strefy niewidomej, jednostka 1M i ustawia wyświetlacz odległości w strefie ślepej na 0; | Sześć bajtów | 55 04 02 01 2c 7e (300m to najbliższa odległość) |
| 6 | 0x06 | Skumulowana liczba zapytań o wyjściowe światła | D1 = 00 (H) D1 = 00 (H) | Zasilanie przechowywania; | Sześć bajtów | 55 06 02 00 00 51 |
| 7 | 0x31 | Ustaw precyzyjny kod | D4 D3 ~ D0 | D4: Precyzyjna liczba kodu, wbudowana 8 grup, numer 1 ~ 8; D3 ~ D0 reprezentuje okres impulsu, jednostka usrange: 45000 ~ 60000 | Dziewięć bajtów | 55 31 05 01 00 00 C3 50 F3 (Precyzyjna liczba kodu: 1cycle: 0000C350 = 50000US) |
| 8 | 0x32 | Ustaw kody przedziałów zmiennych | D33 (Ref.) D32 (liczba bitów kodowania) D31 ~ D30 (przedział czasowy między ostatnim bitem 0) D29 ~ D28 (przedział czasowy między bitami 14 a bitami 15) D27 ~ D26 (przedział czasowy między bit13 BIT14) D25 ~ D24 (czas między bitami 12 a bitami 13) D23 ~ d22 (czas BIT12) BIT10 BIT11) D19 ~ D18 (Odstęp czasowy między BIT9 BIT10) D17 ~ D16 (przedział czasu między BIT8 BIT9) D15 ~ D14 (przedział czasu między bit7 bit8) D13 ~ D12 (przedział czasu między bit6 a bit7) D11 ~ D10 (przedział czasu między bit5 bit6) BIT4) D5 ~ D4 (przedział czasu między bit2 bit3) d3 ~ d2 (przedział czasu między bit1 bit2) d1 ~ d0 (przedział czasu między bit0 a bit1) | D33: Numer kodu przedziału zmiennego, wbudowany 16 grup, zakres liczb wynosi 1 ~ 16; D32: Liczba bitów kodowania, od 3 do 16-czasowej jednostki interwałowej: 45000 ~ 60000 | 38 bajtów |
|
| 9 | 0x33 | Ustawienie pseudo-randokich kodów | D4 D3 ~ D0 | D4: Pseudo-Random Coding, z 2 wbudowanymi grupami, numer od 1 do 2; D3: długość pseudo-randomu, od 2 do 16d2 D1: Wartość początkowa pseudo-randomowego kodu, który jest pobierany z dolnego bitu w zależności od długości pseudo-randaka | Dziewięć bajtów | 55 33 05 01 10 AA AA 00 72 (Pseudo-Random Numer kodu: 1PSEUDO Losowy kod Długość: 16 Wartość międzynarodowa: AAAA) |
| 10 | 0x41 | Ustaw zapytanie dla kodów precyzyjnych | D1 D0 | D1: Precyzyjny numer kodu, zakres liczb to 1 ~ 8d0: gotowość, ustaw 0 | Sześć bajtów | 55 41 02 01 00 13 Otrzymuj zapytanie dla kodu precyzyjnego 1 |
| 11 | 0x42 | Ustaw zapytanie dla kodów przedziałów zmiennych | D1 D0 | D1: Numer kodu przedziału zmiennego, zakres liczb to 1 ~ 16d0: gotowość, ustaw 0 | Sześć bajtów | 55 42 02 01 00 14 Otrzymuj zapytanie do kodowania zmiennej 1 |
| 12 | 0x43 | Skonfiguruj zapytanie do pseudo-randomych kodów | D1 D0 | D1: Numer kodu pseudo-randomu, zakres liczb to 1 ~ 2d0: | Sześć bajtów | 55 43 02 01 00 15 Otrzymuj zapytanie z pseudo-lodowatym kodowaniem 1 |
| 13 | 0x44 | Ustawienie czasu pracy ciągłego napromieniowania | D1 = 00 (H) D0 = yy (H) | Ciągły czas napromieniania odnosi się do ciągłego czasu pracy miernika w trybie ciągłego napromieniania, jednostki s. Automatyczny przystanek zostanie zatrzymany po limicie limitu czasu | Sześć bajtów | 55 44 02 00 3C 2fontinujący czas pracy 60s |
| 14 | 0x45 | Ciągłe napromieniowanie zapytanie dotyczące czasu pracy | D1 = 00 (H) D0 = 00 (H) |
|
Sześć bajtów | 55 45 02 00 00 12 |
| 15 | 0x30 | Precyzyjne napromieniowanie kodu | D3 ~ D0 | D3: Tryb napromieniania, 00 Ciągłe napromienianie, 01 Okresowe napromieniowanie 2: 01 Precyzyjne kod napromieniowania | Osiem bajtów | 55 30 04 00 01 01 00 61 Kod 1, Ciągłe oświetlenie precyzyjnego kodu |
| Napromieniowanie kodu przedziału zmiennego | D3 ~ D0 | D3: Tryb napromieniania, 00 ciągłe napromienianie; 01 Okresowe napromieniowanie 2: 02 Kod przedziału zmiennej napromieniowanie | Osiem bajtów | 55 30 04 00 02 01 00 62 Code 1, Ciągłe napromienianie kod przedziału zmiennego | ||
| Zewnętrzne napromieniowanie synchroniczne | D3 ~ D0 | D3: 00 Zewnętrzna synchronizacja jest tylko ciągłym IlluminationD2: 03 Zewnętrzna synchroniczna napromieniowanie 1: 00d0: 00 | Osiem bajtów | 55 30 04 00 03 00 00 62 | ||
| Napromieniowanie pseudo-randomu | D3 ~ D0 | D3: Tryb napromieniania, 00 ciągłe napromienianie; 01 Okresowe napromieniowanie 2: 04 Pseudo-Random Kod napromieniowania | Osiem bajtów | 55 30 04 00 04 01 00 64 Code 1, Pseudo-Random Kod Ciągłe napromieniowanie | ||
| 16 | 0x24 | Okresowe ustawienie parametrów napromieniowania | D2 D1 D0 | D2: Liczba cyklu roboczego 1: Czas pracy na cykl, jednostka SD0: czas odpoczynku na cykl, w S. | Siedem bajtów | 55 24 03 08 14 0A 64 (8 cykli, prac prac 20s i 10s odpoczynek na cykl) |
| 17 | 0x25 | Okresowe zapytanie parametrów napromieniowania | D1 = 00 (H) D0 = 00 (H) |
|
Sześć bajtów | 55 25 02 00 00 72 |
| 18 | 0xeb | Zapytanie o numer sprzętu | D1 = 00 (H) D0 = 00 (H) |
|
Sześć bajtów | 55 EB 02 00 00 pne |
| 19 | 0x51 | Tryb debugowania | D1 D0 | D1: 01 Wprowadź tryb debugowania, 00 Wyjście Debugowanie Moded0: Standby | Sześć bajtów | 55 41 02 01 00 17 Wenter Tryb debugowania 55 41 02 00 00 16Exit Tryb debugowania |
|
|
|
|
|
|
|
|
a) Kontrola główna odbiera format
Format otrzymanej wiadomości jest następujący:
Format otrzymanej wiadomości jest następujący:
| STX0 | CMD | Len | Dane | Data0 | Chk |
Tabela 4 Opis formatu otrzymanych wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Wiadomość Start Flag 1 | 55 (h) |
|
| 2 | Cmd_jg | Słowo polecenia danych | Patrz Tabela 5 |
|
| 3 | Len | Dl | Liczba wszystkich bajtów, z wyjątkiem znaku początkowego, słowa polecenia i sumy kontrolnej |
|
| 4 | Dn | parametr | Patrz Tabela 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Weryfikacja XOR | Z wyjątkiem ważnego bajtu, wszystkie pozostałe bajty są XORED |
|
Opis statusu otrzymania kontroli głównej:
Tabela 5 opisuje słowo danych wysyłane przez miernik do mistrza
Tabela 5 opisuje słowo danych wysyłane przez miernik do mistrza
| numer zamówienia | CW | Informacje zwrotne od funkcji (odpowiadające poleceniu kontrolne otrzymane przez urządzenie pomiarowe) | bajt danych | uwagi | całkowita długość |
| 1 | 0x00 | Stop (przestań oświetlenie) | D1 = 00 (H) D0 = xx (H) | XX: 00 Normalny stoper01 Zatrzymaj w wysokiej temperaturze02 Zatrzymaj się, gdy jest opóźniony | Sześć bajtów |
| 2 | 0x03 | samoocena | D8 ~ D0C5 ~ C0B2 ~ B0 | D8-D7 (Typ int): -5V Wartość zwrotna Wartość napięcia, jednostka 0,01 V.D6-D5: Informacje zwrotne wartości ustawienia ślepej plamki, jednostka 1MD4-D3: APD Wysokie napięcie sprzężenia zwrotne, jednostka V; D2: Typ charakteru, wskazujący temperaturę środowiska sterowania głównego (środowisko), jednostka: stopnie Celsjusz; AC3-C2: Ustaw sprzężenie zwrotne Wartość prądu napędu w jednostce AC1-C0: Temperatura Temperatura Sprężność sprzężenia zwrotnego 0,1 ℃ B2: Stan kontroli temperatury napędu (8-bitowe) Bit0: 0 Kontrola temperatury do temperatury 1 Niezbyt osiągniętaBbit Różnica między prądem napędu a wartością ustaloną jest większa niż 5AB1: Status komunikacji napędu (mierzenie statusu komunikacji między główną płytą sterującą a modułem napędu) 0 jest normalna, a 1 jest usterką 0: Ustaw, czy prąd jest udany Utwór QueryB0: Kontrola temperatury Status komunikacji (status komunikacji między główną płytą sterującą a modułem kontroli temperatury) 0 jest normalny, a 1 jest usterką 0: czy start kontroli temperatury jest powodzeniem | 22 bajtów |
| 3 | 0x04 | Ustawienie strefy ślepej, jednostka M | D1 D0 | Dane opisują najbliższą wartość odległości, jednostka 1M; rozpocznij wysokie i kończą niskie | Sześć bajtów (oszczędność mocy upuszcza) |
| 4 | 0x06 | Skumulowana liczba zapytań o wyjściowe światła | D3 ~ D0 | Dane wyrażają liczbę świateł, 4 bajty, z pierwszym wysokim bajtem | Osiem bajtów |
| 5 | 0x31 | Ustaw precyzyjny kod | D4 D3 ~ D0 | D4: Precyzyjna liczba kodu, zakres 1 ~ 8d3 ~ d0 reprezentuje okres, jednostka usrange: 45000 ~ 60000 | Dziewięć bajtów |
| 6 | 0x32 | Ustaw kody przedziałów zmiennych | D1 D0 | D1 Zakres numeru liczbowego przedziału zmiennej 1 ~ 16d0 00 jest ustawiony pomyślnie, a 01 jest ustawiony nieudany | Sześć bajtów |
| 7 | 0x33 | Ustaw pseudo-randomy kod | D1 D0 | D1 Pseudo-Random Kod Numer Zakres 1 ~ 2d0 00 jest ustawiony pomyślnie, a 01 jest ustawiony nieudany | Sześć bajtów |
| 8 | 0x41 | Precyzyjne zapytanie do cyklu kodu | D4 D3 ~ D0 | D4: Precyzyjny numer kodu, zakres 1 ~ 8d3 ~ d0 reprezentuje okres, jednostka usrange: 45000us ~ 60000us | Dziewięć bajtów |
| 9 | 0x42 | Zmienne zapytanie do kodu interwałowego | D33 (Ref.) D32 (liczba bitów kodowania) D31 ~ D30 (przedział czasowy między ostatnim bitem 0) D29 ~ D28 (przedział czasowy między bit14 bit15) D27 ~ D26 (przedział czasu między bit13 BIT14) D25 ~ D24 (przedział czasowy między bitami 12 a bitami 13) D23 ~ D22 (czas czasowy 11 i bit 12) między bitami 10 a bitami 11) D19 ~ D18 (przedział czasu między BIT9 a BIT10) D17 ~ D16 (przedział czasu między bit8 bit9) D15 ~ D14 (przedział czasu między bitami 7 a bitami 8) D13 ~ D12 (czas czasowy między bit6 BIT7) D11 ~ D10 (Interval między bit5 Bit6) BIT3 BIT4) D5 ~ D4 (przedział czasu między BIT2 BIT3) D3 ~ D2 (przedział czasu między bit1 bit2) D1 ~ D0 (przedział czasu między bit0 bit1) |
|
38 bajtów |
| 10 | 0x43 | Pseudo-Random Query | D4 D3 ~ D0 | D4: Pseudo-Random Kodowanie kodu, Zakres 1 ~ 2d3: Długość pseudo-randomu, od 2 do 16d2 D1: Wartość początkowa pseudo-lampa, która jest pobierana z dolnego bitu w zależności od długości pseudo-lanistycznego kodowania | Dziewięć bajtów |
| 11 | 0x44 | Ustawienie czasu pracy ciągłego napromieniowania | D1 = 00 (H) D0 = yy (H) | Czas ciągłego napromieniania, jednostka S, limit czasu automatycznie zatrzymuje się | Sześć bajtów |
| 12 | 0x45 | Zapytanie o czas pracy ciągłej ekspozycji | D1 = 00 (H) D0 = yy (H) | Czas ciągłego napromieniania, jednostka S, limit czasu automatycznie zatrzymuje się | Sześć bajtów |
| 13 | 0x24 | Okresowe ustawienie parametrów napromieniowania | D2 D1 D0 | D2: Liczba cyklu roboczego 1: Czas pracy na cykl, jednostka SD0: czas odpoczynku na cykl, w S. | Siedem bajtów |
| 14 | 0x25 | Okresowe zapytanie parametrów napromieniowania | D2 D1 D0 | D2: Liczba cyklu roboczego 1: Czas pracy na cykl, jednostka SD0: czas odpoczynku na cykl, w S. | Siedem bajtów |
| 15 | 0xeb | Zapytanie o numer sprzętu | D15 ~ D0 | D15 ~ D12: Produkt ModelD11 D10: Numer produktu | 20 bytes |
| 16 | 0x51 | Tryb debugowania | D1 D0 | D1: 01 Wprowadź tryb debugowania, 00 Wyjście Debugowanie Moded0: Standby | Sześć bajtów |
| 17 | 0x01 | Pojedynczy oddział | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (BIT7-BIT0) BYTE FLAG: D9 to 7. pozycja wskazująca falę główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to 6. pozycja wskazująca echo; 1: Istnieje echo, 0: Brak echod9 5. bit wskazuje status lasera; 1: Normalny laser, 0: Laser Faird9 jest nieprawidłowy (ustawiony na 0) w 4. pozycji; D9 jest nieprawidłowy w 3. pozycji (ustawiony na 0); D9 Pozycja wskazuje stan APD; 1: Normalny, 0: Errord9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje cel, 0: Brak celu (celem przed głównym celem jest poprzedni cel, a cel w obszarze ślepym) .D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje cel, 0: Nie ma celu (celem po głównym celu jest późniejszy cel) D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) D5-D3 odległość do drugiego celu (jednostka 0,1 m) D2-D0 trzecia odległość docelowa (jednostka 0,1 m) 3. Cele pochodzą od bliskiego do FARB4, a B3 wskazują wartości wysokiego ciśnienia B2 Wskazuje, że prąd napędowy wartość B0B1 B0 Wskazuje temperaturę lasera | 19 bajtów |
| 18 | 0x02 | Ciągły odległość | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (BIT7-BIT0) BYT FLAG: D9 to 7. pozycja wskazująca falę główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to 6. pozycja wskazująca echo; 1: Istnieje echo, 0: Brak echod9 5. bit wskazuje status lasera; 1: Normalny laser, 0: Laser Faird9 jest nieprawidłowy w 4. pozycji (ustawiony na 0); D9 jest nieprawidłowy w 3. pozycji (ustawiony na 0); D9 Pozycja wskazuje stan APD; 1: Normal, 0: Errord9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje cel, 0: Nie ma celu (celem przed głównym celem jest poprzedni cel, a cel w obszarze niewidomego) .D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje cel, 0: Nie ma celu (celem po głównym celu jest późniejszy cel) D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) D5-D3 odległość do drugiego celu (jednostka: 0,1 m) trzecia odległość docelowa D2-D0 (jednostka 0,1 m) 3. Cele pochodzą od bliskiego do FARB4, a B3 wskazują, że wartość wysokiego ciśnienia APDB2 Wskazuje, że prąd napędowy wartość B0 B0 reprezentuje temperaturę lasera | 19 bajtów |
| 19 | 0x30 | lustrzany | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (BIT7-BIT0) BYTE FLAG: D9 to 7. bit wskazujący na falę główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to 6. pozycja wskazująca echo; 1: Istnieje echo, 0: Brak echod9 5. bit wskazuje status lasera; 1: Normalny laser, 0: Laser Faird9 jest nieprawidłowy w pozycji 4 (ustawiony na 0) D9 jest nieprawidłowy w trzeciej pozycji (ustawiony na 0); D9 Druga pozycja wskazuje status APD; 1: Normal, 0: Errord9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje cel, 0: Brak celu (celem przed głównym celem jest poprzedni cel, a cel w obszarze ślepym) .D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje cel, 0: Nie ma celu (celem po głównym celu jest późniejszy cel) D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) D5-D3 odległość do drugiego celu (jednostka: 0,1 m) D2-D0 trzecia odległość docelowa (jednostka 0,1 m) 3. Cele pochodzą od bliskiego do FARB4, a B3 wskazują, że wartość wysokiego ciśnienia APDB2 Wskazuje, że prąd napędowy wartość B0 B0 reprezentuje temperaturę lasera | 19 bajtów |
| 20 | 0xec | Błąd instrukcji | D1 = 00 D0 = 00 | Polecenie sprzężenia zwrotnego kamery jest nieprawidłowe | Sześć bajtów |
| 21 | 0xee | Błędy skuteczności | D1 = 00 D0 = 00 | Informacja zwrotna z kamery jest nieprawidłowa | Sześć bajtów |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Uwaga: ① Niezdefiniowany bajt/bit, domyślnie to 0; | |||||
Gorące Tagi: 45MJ Laser Target Designator (LTD) WIHT LRF, producenci, dostawcy, fabryka, Chiny, wykonane w Chinach, dostosowane, wysokiej jakości
Powiązana kategoria
Moduł dalmierza laserowego 905nm
Moduł dalmierza laserowego 1535nm
Moduł dalmierza laserowego 1570nm
1,54UM LASER MODULE
1064 Nm Laser Cel Desperator
Moduł anty -dronów
Zasięgowy moduł Lidar
Wyślij zapytanie
Prosimy o przesłanie zapytania w poniższym formularzu. Odpowiemy ci w ciągu 24 godzin.




 Wiht LRF")